

Grid-based contour line segment feature extraction algorithm
A feature extraction and grid technology, applied in the field of mobile robots, can solve the problems of easy error, easy misjudgment, misjudgment at the end of the line segment, etc., to achieve the effect of simple method, lower performance requirements, and lower impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0068] Such as Figure 1 to Figure 4 Shown is the embodiment of the raster-based contour segment feature extraction algorithm of the present invention, comprising the following steps:
[0069] S10. Construct a grid map including several obstacle grids, and extract the center point coordinates of the obstacle grids to form a data point set M={P 1 ,P 2 ,...,P N};
[0070] S20. Based on the Euclidean distance clustering method, the point set M is divided into several first clustering point sets M by the Euclidean distance measure between data points i ={P 1 ,P 2 ,...,P K};
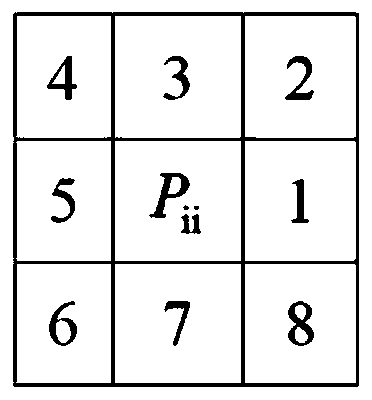
[0071] S30. For each first cluster point set M based on path search and branch point judgment i The data points are sorted to obtain the sorted second clustering point set M ii ,M ii The data points in satisfy the order of the topological structure;
[0072] S40. Each second clustering point set M ii The data points within are divided into several data segments S j ={P 1 ,P 2 ,...,P J}, the da...
Embodiment 2
[0119] Such as Figure 5 , Figure 6 Shown is an embodiment of the grid-based feature extraction algorithm for contour line segments of the present invention, which aims to verify the reliability and effectiveness of the algorithm for extracting line segments of the present invention. Different experimental environments are simulated and built, and the algorithm of the present invention is used for testing. Such as Figure 5 , Figure 6 The real picture and grid map of single rectangular space and multi-rectangular space are shown respectively. The left side is the real picture of the test environment, and the right side is the grid map and line segment features generated by the mobile robot; in the grid map, white represents the grid The status is unknown, blue means the grid status is an obstacle, green means the grid status is cleaned, and yellow means the grid status is blank. The test results show that in an environment with complex, dense and irregular distribution o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More