

Remote operation method of distribution network live working robot and construction method of motion track library for distribution network live working robot
A technology of live work and construction method, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve the problems of insufficient on-site information, loss of three-dimensional information, and heavy control tasks for operators, and achieve the goal of improving the level of intelligence and operating efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
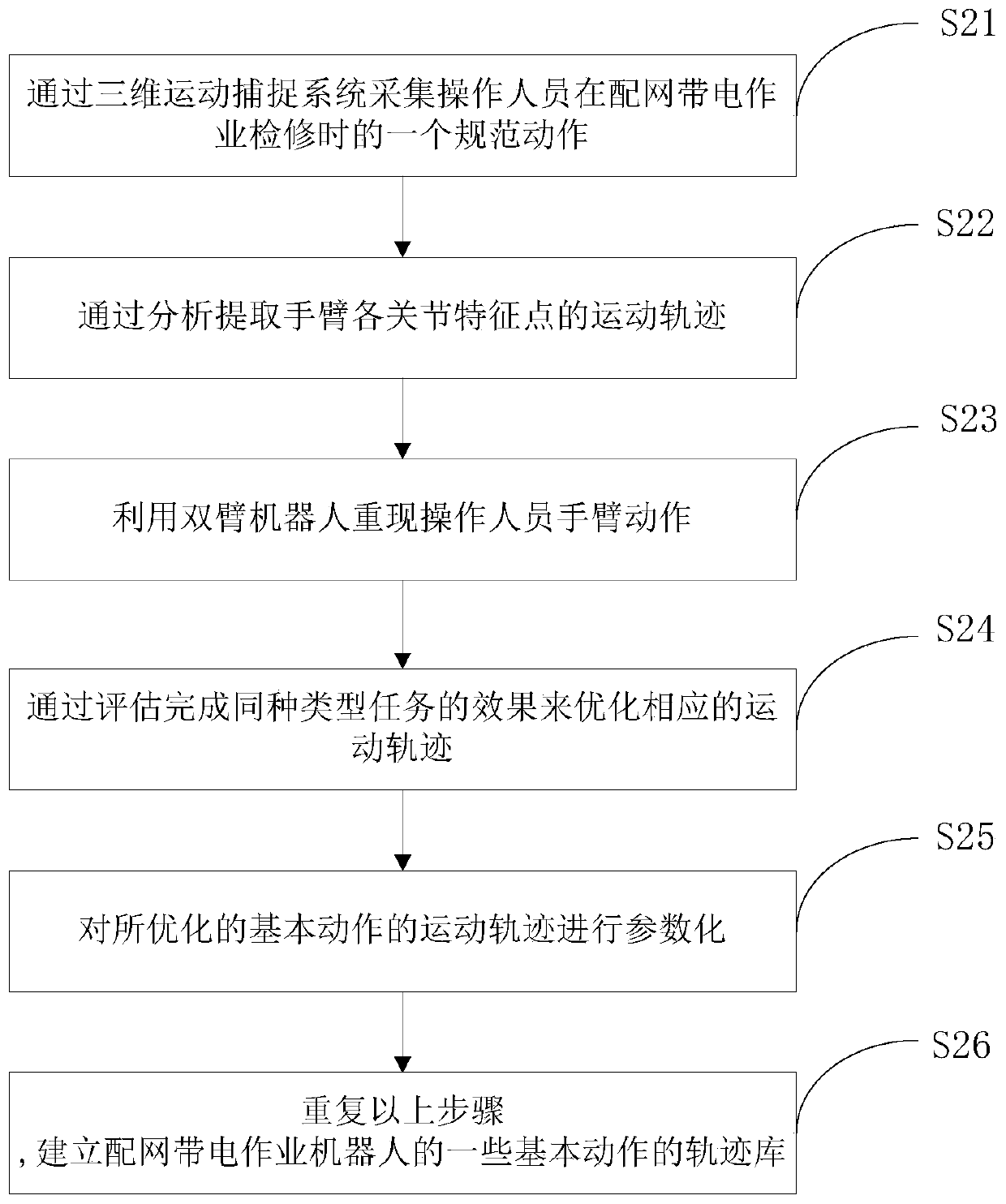
[0062] Such as Figure 4 As shown, the first step in the establishment of the action trajectory library is to find the operator 22 who is looking for the operation specification to simulate the operation action offline, such as stripping wires, changing fuses and screwing screws. The three-dimensional capture camera 21 will capture and record the actions of the markers 24 placed on the shoulder, upper arm, forearm, hand, etc. of the operator 22 in advance, wherein the operating tool library 23 is used in conjunction with the operator 22 .
[0063] Such as Figure 5 As shown, the marking of the operator's arm movement can be achieved using five marking points. Specifically, a marker point P1 is set on the operator's shoulder, a marker point P2 is set on the elbow, a marker point P3 is set on the wrist, and a marker point P4 and a marker point P5 are set on the left and right sides of the back of the hand.
[0064] Among them, the optional method of calculating the joint angle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More