

Flexible welding robot system and welding method thereof
A welding robot and welding method technology, applied in welding accessories, manipulators, program-controlled manipulators, etc., can solve problems such as inconvenient use and physical injury of workers, improve product quality and production efficiency, save labor costs, and improve welding efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0071] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments, where the schematic embodiments and descriptions of the present invention are used to explain the present invention, but not to limit the present invention.
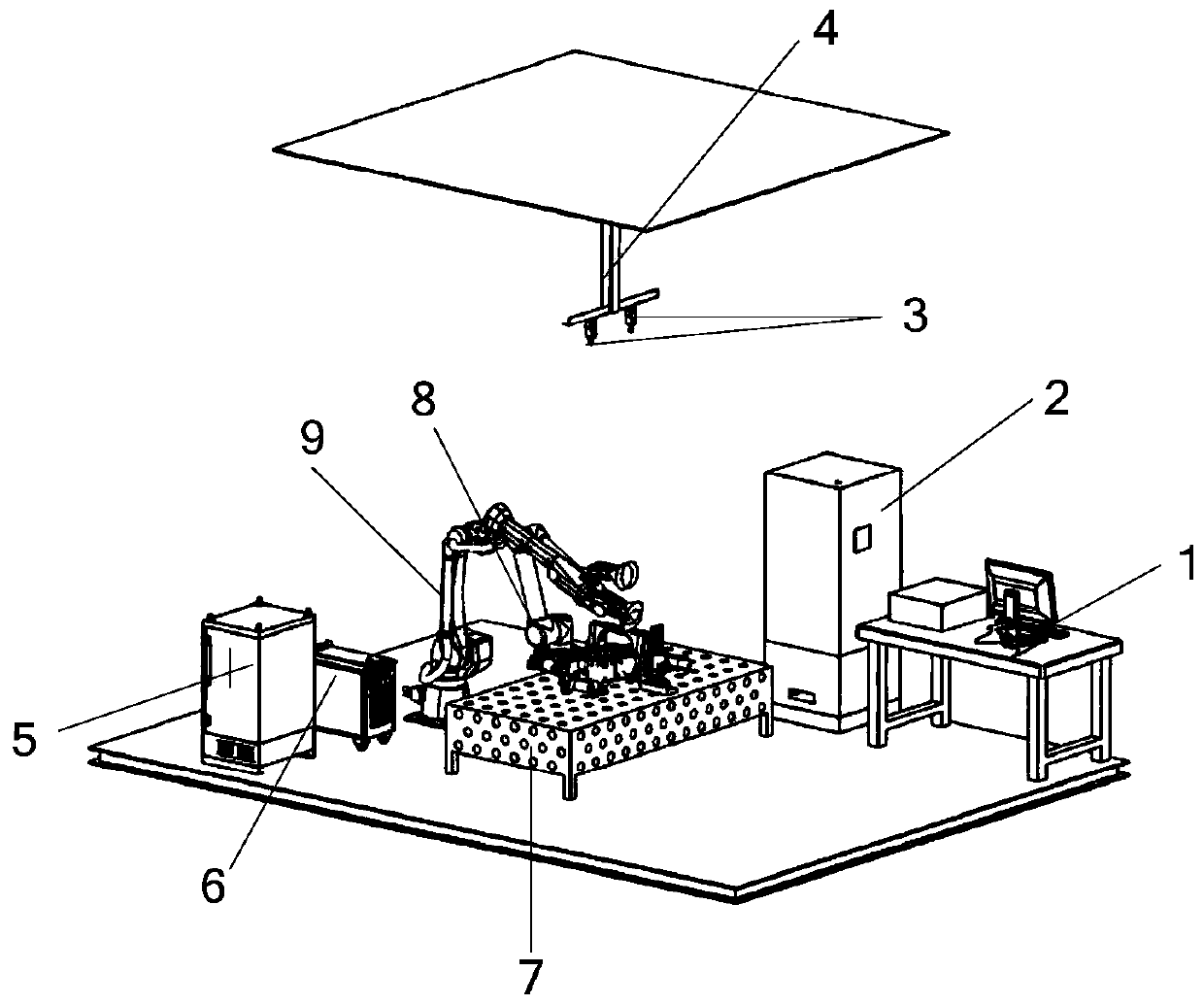
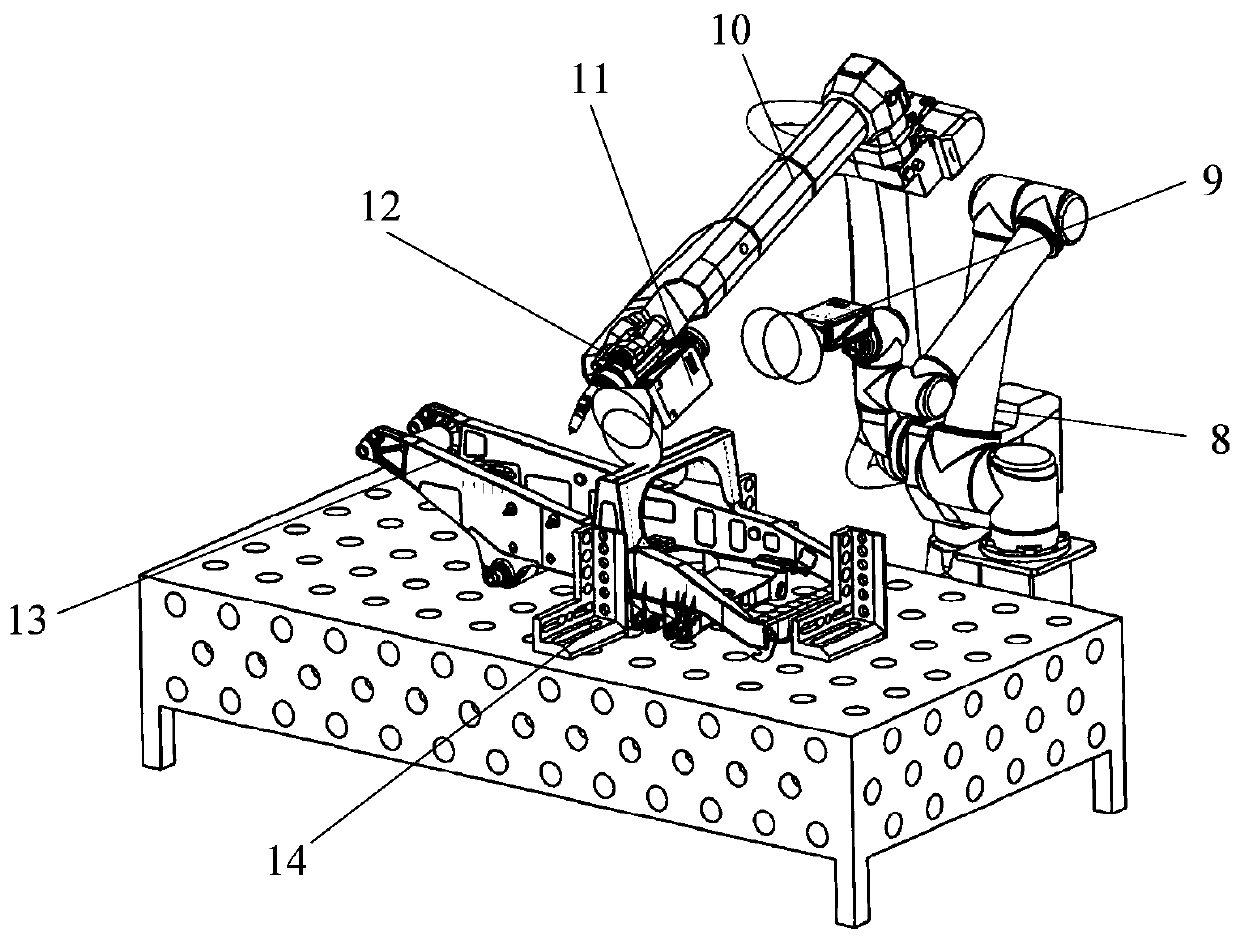
[0072] Such as figure 1 , figure 2 As shown, a flexible welding robot system of the present invention includes: a global vision unit, a flexible welding robot unit, a flexible detection robot unit, a master control unit and a workbench unit; wherein,
[0073] The global vision unit comprises a global vision assembly 3 and a global vision assembly fixing frame 4 fixed on the ceiling, the global vision assembly 3 is fixed at the bottom of the global vision assembly fixing frame 4, and the global vision assembly 3 is provided with a multifunctional welding workbench 7 below the global vision assembly 3. The functional welding workbench 7 is provided with a workpiece 13 to be welded clamped...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More