

Universal servo control algorithm validity verification device
A servo control and verification device technology, applied in general control systems, control systems, software algorithm control, etc., can solve the problem that a set of experimental systems cannot be applied to multiple control algorithms, lack of versatility, and the actual servo system effectiveness verification and control It is difficult to verify the actual effectiveness of the algorithm, and achieve the effects of strong practicability, reduced workload, and easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
[0027] The embodiment of the present invention provides a universal servo control algorithm validity verification device.
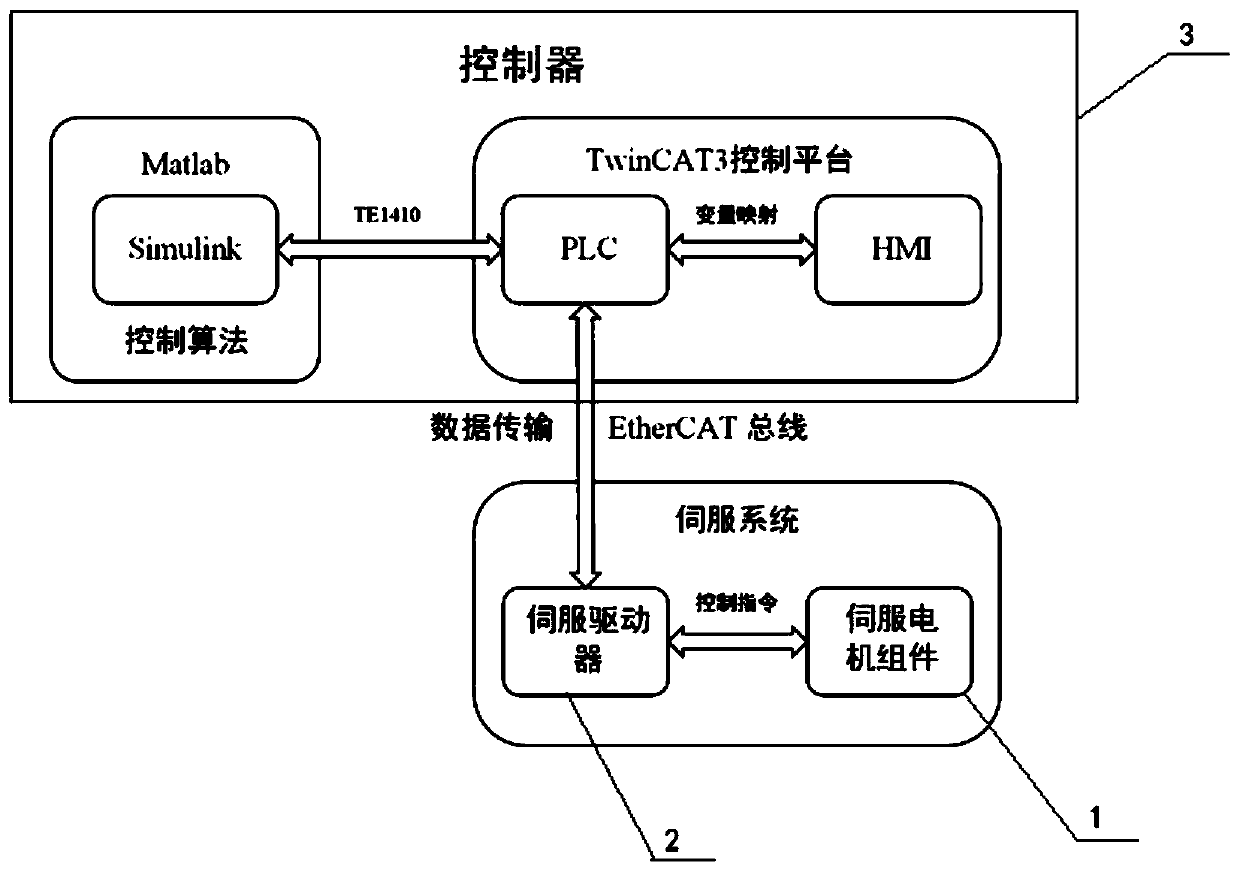
[0028] Please refer to figure 1 , figure 1 It is a control structure diagram of a general-purpose servo control algorithm validity verification device in an embodiment of the present invention; it includes: a servo motor assembly 1, a servo driver 2 and a controller 3;
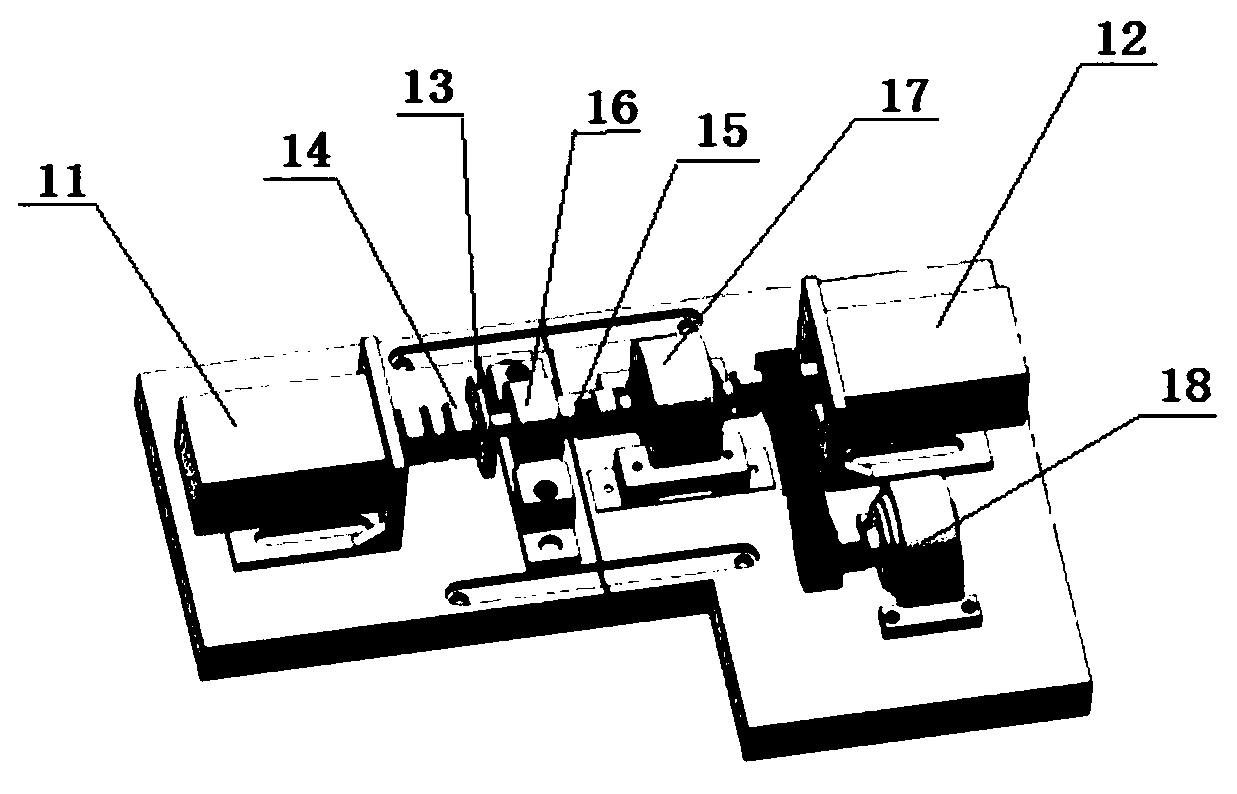
[0029] see figure 2 , figure 2 It is a device diagram of the servo motor assembly in the embodiment of the present invention; the servo motor assembly 1 includes: a first AC motor 11, a second AC motor 12, a grading flywheel 13, a first coupling 14, and a second coupling 15. Bearing housing 16, magnetic powder brake 17 and ma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More