

Singular perturbation theory based flexible mechanical arm motion control method
A singular perturbation theory and flexible manipulator technology, applied in the field of flexible manipulators, can solve the problems of flexible manipulators such as vibration, stretching deformation, and easy bending, and achieve high control precision, simple method implementation, and strong robustness and anti-interference effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The motion control method of the flexible robot arm according to the embodiment of the present invention will be described below with reference to the accompanying drawings.
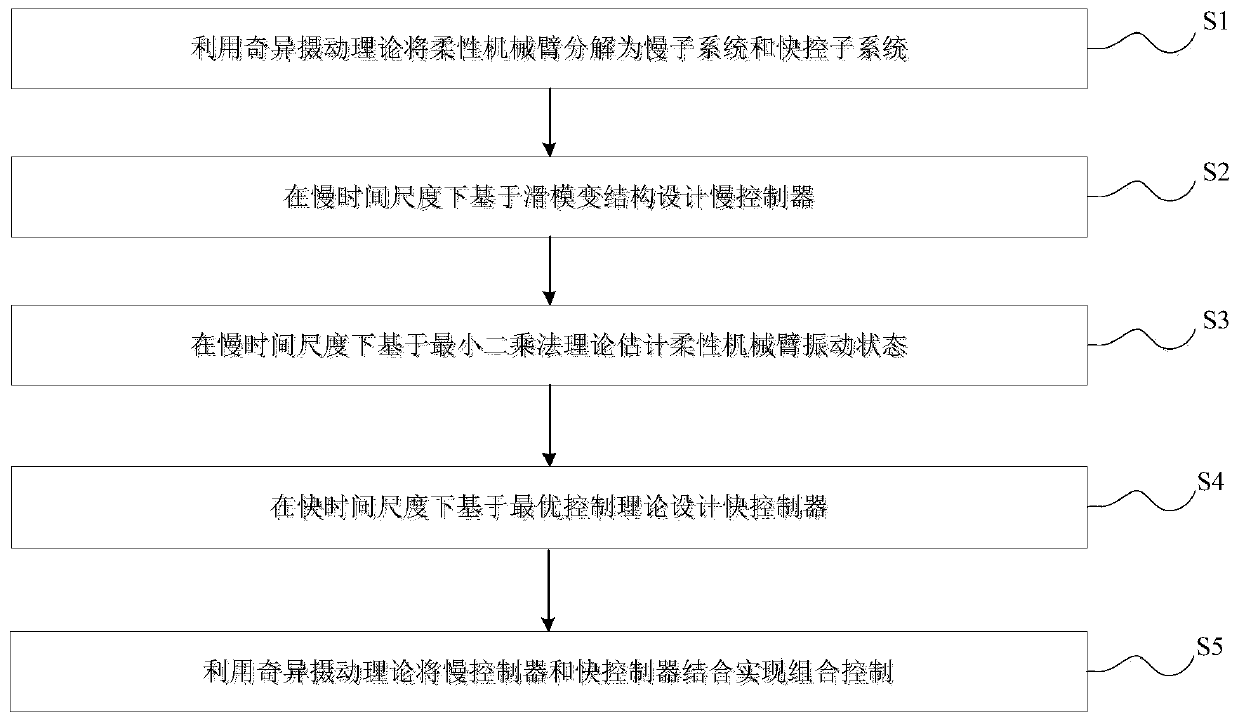
[0027] Such as figure 1 As shown, a method for controlling the motion of a flexible manipulator based on the singular perturbation theory in an embodiment of the present invention includes the following steps:
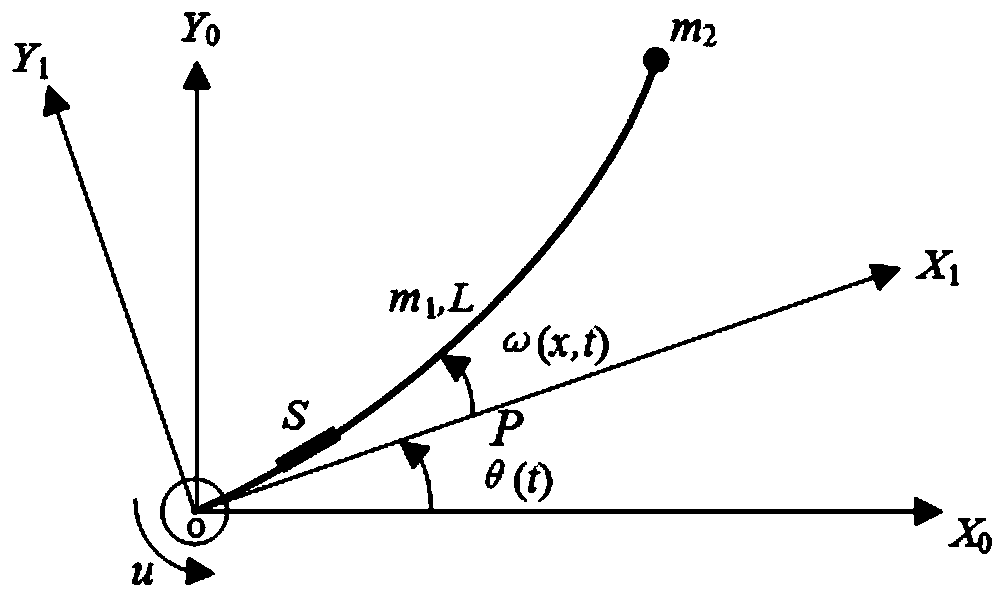
[0028] S1: Based on the Lagrangian method and the hypothetical mode method, the dynamic model of the flexible manipulator is established, and the dynamic model is decomposed into subsystems at different time scales by using the singular perturbation theory, including:
[0029] Step 1: Establish a dynamic model of the flexible manipulator Among them, u is the system input, θ is the rotation angle of the manipulator, q is the vibration mode of the system, M is a positive definite matrix, and G θ , G q is the nonlinear term, K is the stiffness matrix, d is the external disturbance, and d ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More