

Multi-target passive positioning method based on underwater sensor network
An underwater sensor and passive positioning technology, applied in positioning, network topology, instruments, etc., can solve the problems of difficulty in obtaining orientation information, large delay in underwater acoustic communication, and huge consumption, so as to reduce the amount of data communication and improve the accuracy. , the effect of reducing energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
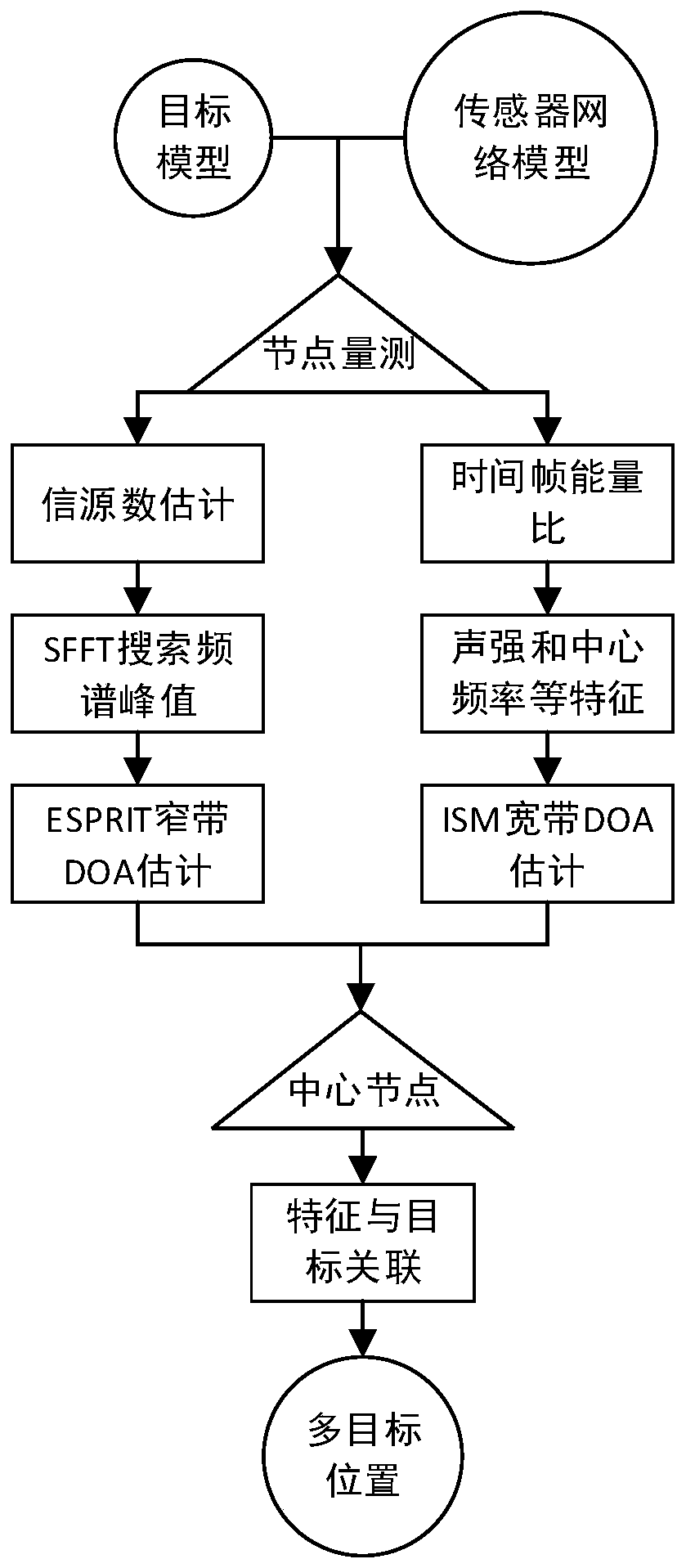
[0076] The invention provides a multi-target passive positioning method based on an underwater sensor network. In the method, firstly, a multi-target positioning model based on a sensor network is established, including a sensor node array model and a target source model, and initialized.
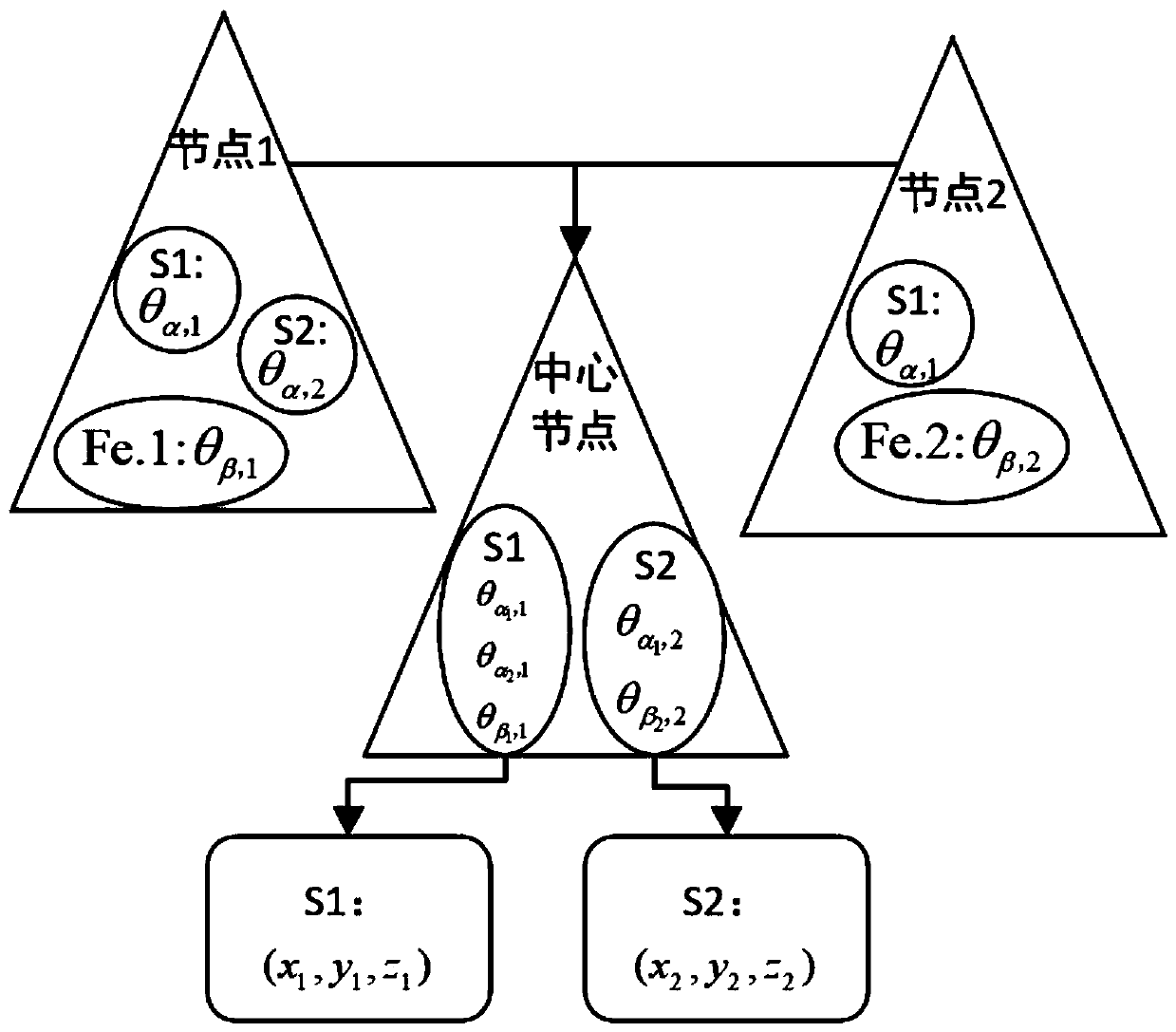
[0077] Secondly, a single-node vector hydrophone array DOA estimation model is established, and the received signal is time-space divided into frames, and the single-hydrophone received signal is subjected to short-time Fourier transform to obtain the estimated frequency f of the narrowband signal 1 , and perform DOA estimation on multiple sources, and obtain the spatial orientation estimation result θ α . At the same time, high-frequency short-term strong noise is captured through time-domain sound intensity detection, and feature F and spatial orientation estimation θ are obtained β . The orientation estimation results and feature information are transmitted to the central node for fusi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More