

Six-degree-of-freedom parallel robot motion analysis modeling and rapid solving method
A robot motion and degree of freedom technology, applied in the direction of manipulators, program-controlled manipulators, joints, etc., can solve problems such as poor applicability, incomplete simulation models, and complex modeling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0108] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
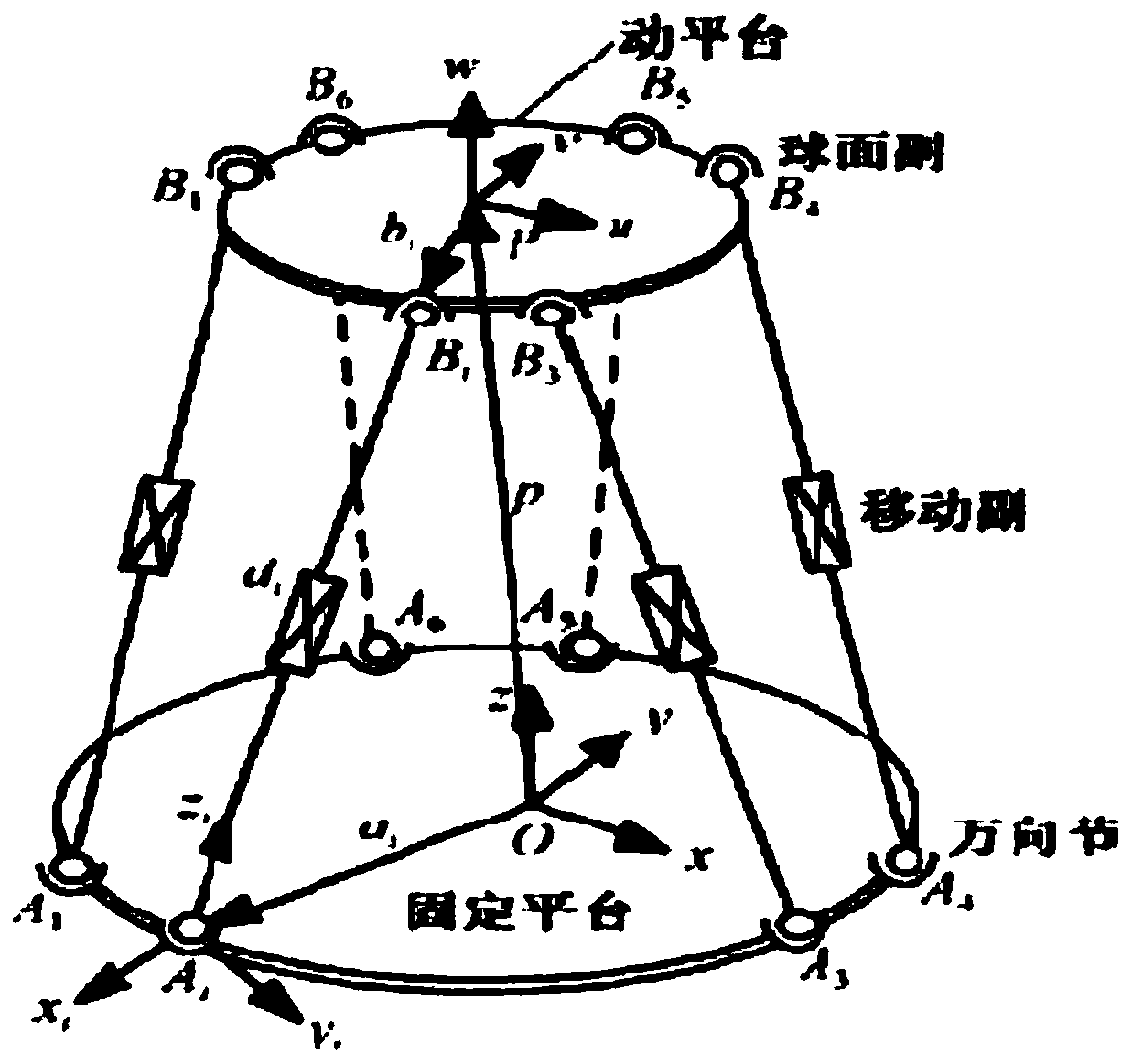
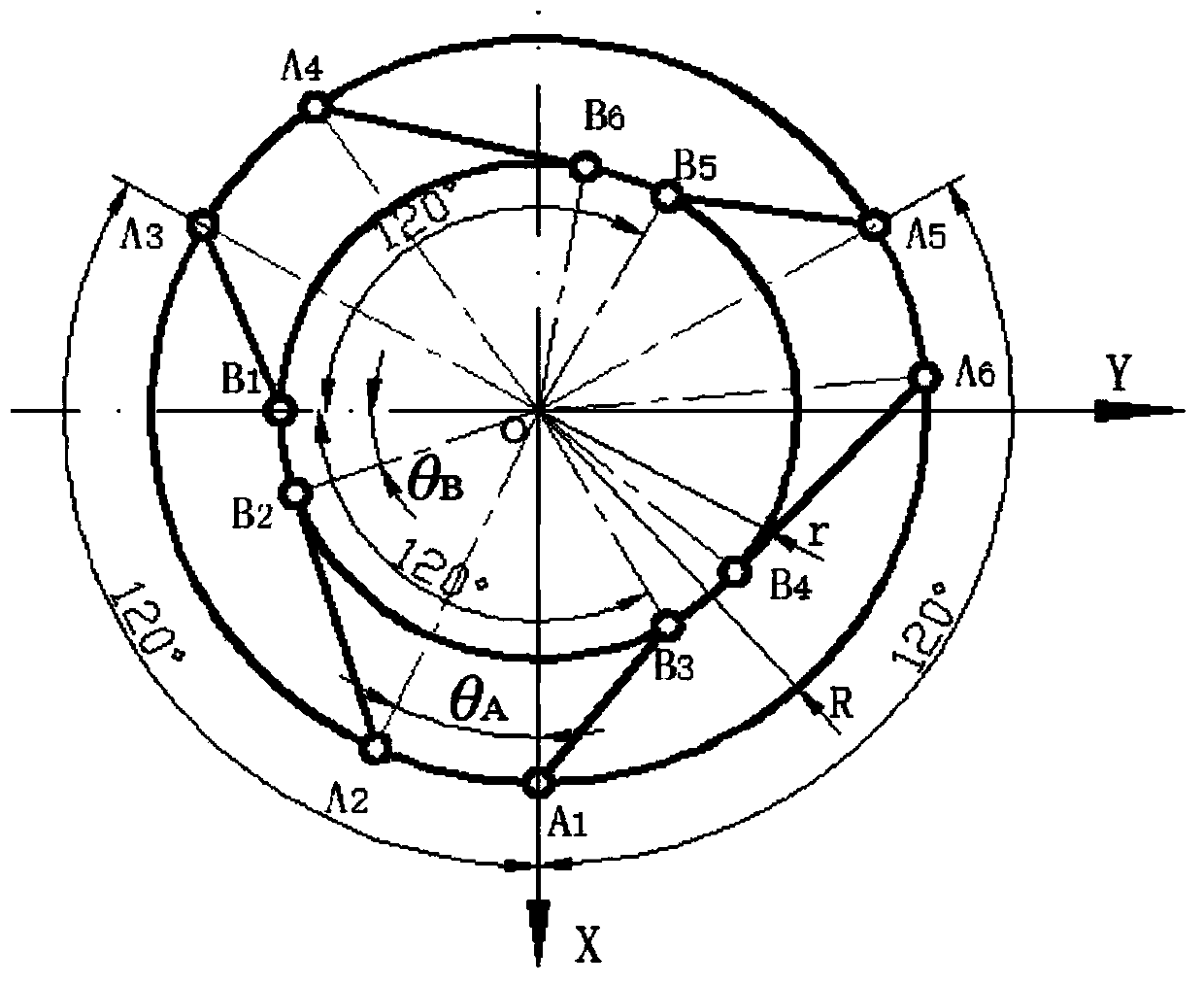
[0109] In order to study the kinematic characteristics of the Stewart six-degree-of-freedom parallel kinematic platform, a mathematical model of space kinematics was established, and the translation coordinate transformation, rotation coordinate transformation, compound attitude and positive and negative solutions were analyzed and calculated. The changing situation and the changing situation with the inclination angle are discussed, and the calculation is solved with the help of MATLAB. According to the established model, the example is calculated and the numerical simulation results are given. Finally, the automatic control method of the six-degree-of-freedom motion platform and the establishment process of the MATLAB / SimMechanics simulation model are described, and the better control of the six-degree-of-freedom parallel robot is finally r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More