

Intelligent inertia energy saving system of pilotless vehicle and control method of intelligent inertia energy saving system
A technology of unmanned vehicles and energy-saving systems, which is applied in the field of intelligent inertial energy-saving systems of unmanned vehicles and its control, can solve the problems of low integration, low energy-saving efficiency, and inability to maximize the energy-saving efficiency of inertial energy-saving systems. The effect of optimizing material saving, increasing driving performance and safety performance, and facilitating utilization of inertial energy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
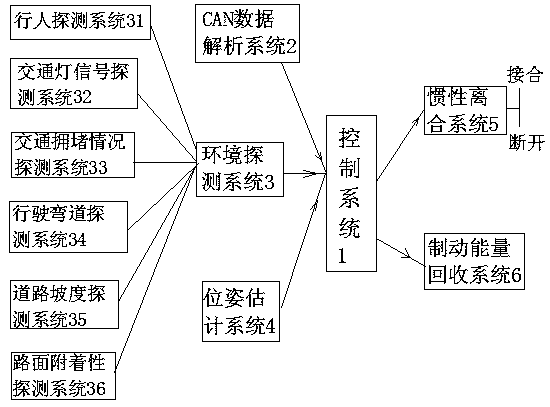
[0033] An intelligent inertial energy-saving system for unmanned vehicles, such as figure 1 As shown, it consists of control system 1, CAN data analysis system 2, environment detection system 3, pose estimation system 4, inertial clutch system 5 and braking energy recovery system 6, CAN data analysis system 2, environment detection system 3 and position The attitude estimation system 4 is respectively connected to the signal input end of the control system 1 , and the signal output end of the control system 1 is respectively connected to the inertial clutch system 5 and the braking energy recovery system 6 .
[0034] In this specific embodiment, the environment detection system 3 adopts binocular stereo camera image processing technology, and the environment detection system 3 includes a pedestrian detection system 31 for detecting whether there are pedestrians in front of the vehicle, and a traffic light signal detection system for detecting traffic light signals. System 32, ...
specific Embodiment 2
[0036] A control method for an intelligent inertia energy-saving system of an unmanned vehicle, the steps are as follows:
[0037] (1) First, analyze the CAN network data of the vehicle through the CAN data analysis system 2 (CANoe, Vector Company), and obtain the vehicle's accelerator pedal position data, brake pedal position data and steering wheel angle data;
[0038] (2) Through the environment detection system 3 (the binocular camera adopts ZED, Stereolabs, and the image calculation unit adopts TX2, NVIDIA), detect the traffic light signal, pedestrian information, traffic congestion information, road slope, driving curve angle and road surface in front of the vehicle Attachment data;
[0039] (3) Obtain the acceleration information and pitch angle information of the vehicle through the pose estimation system 4 (the binocular camera adopts ZED, Stereolabs, and the image calculation unit adopts TX2, NVIDIA);
[0040](4) Judging the traffic light conditions, and analyzing t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More