

Slime mold rrt navigation method and system based on two-dimensional static path planning
A technology of static path planning and navigation method, which is applied in the field of slime mold RRT navigation method and system, which can solve the problems of difficult and narrow passage environment, find the path, etc., and achieve the effect of improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0037] Slime molds are a group of mold-like organisms that form spores with cell walls, cells without cell walls, and, like amoebas, can change shape at will. Slime molds are large single-celled organisms consisting of numerous nuclei and a fluid network of protoplasm. The worm-like cytoplasm can change shape and flow freely, and information from the external environment can be transmitted into the cytoplasm, allowing the worm to take advantage and avoid damage. Slime molds can also move through protoplasm. Thus, slime molds can gather in places of comfort (i.e. nutrients, warmth, and moisture), escape harsh conditions (i.e. cold and dryness) or seek (move toward nutrients).
[0038] Slime molds have been the subject of path planning research due to their biological relative simplicity and behavioral complexity. Slime molds feed on, phagocytose, and consume microbes that grow on nutrients. When the slime mold moves away from nutrients, it expands its area as much as possibl...
Embodiment 2
[0051] In one or more embodiments, a slime mold RRT navigation system based on two-dimensional static path planning is disclosed, including:
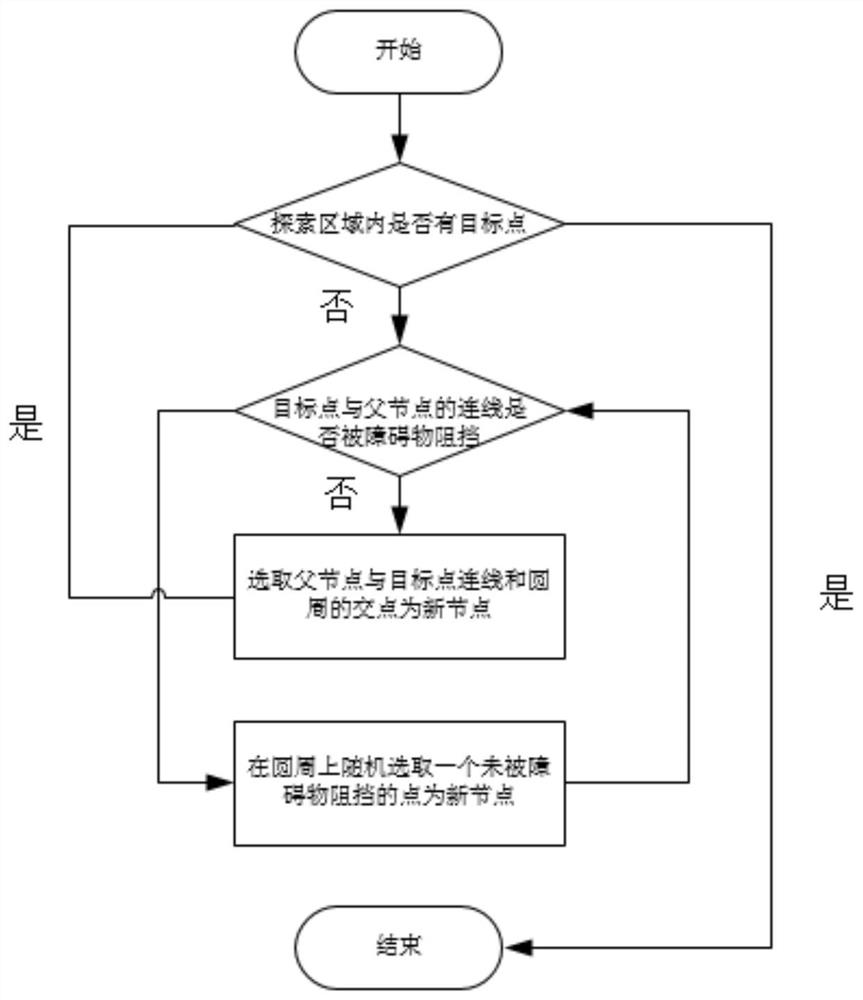
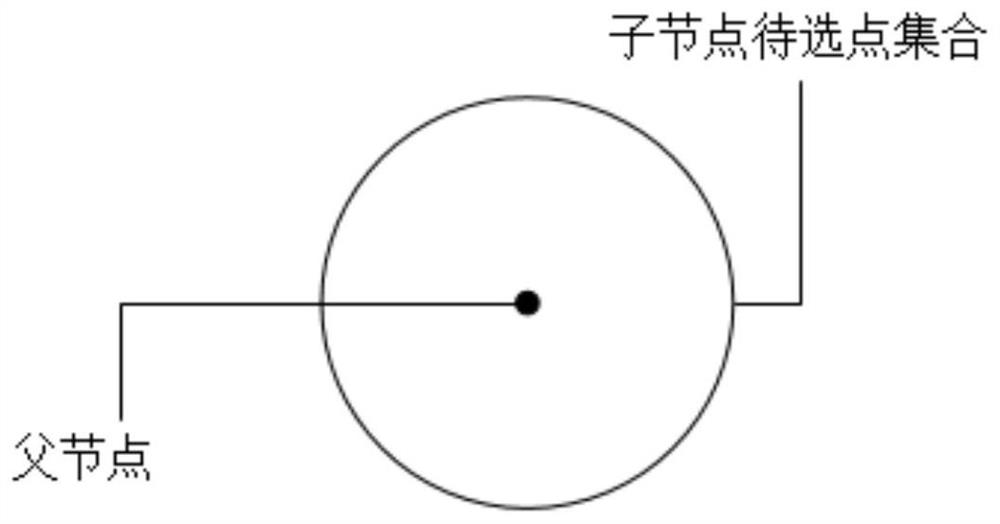
[0052] A device for making a circle with the point where the mobile robot is located as the origin and with the step length as the radius; taking the circle as the exploration range, and the points on the circle as the set of nodes to be selected;
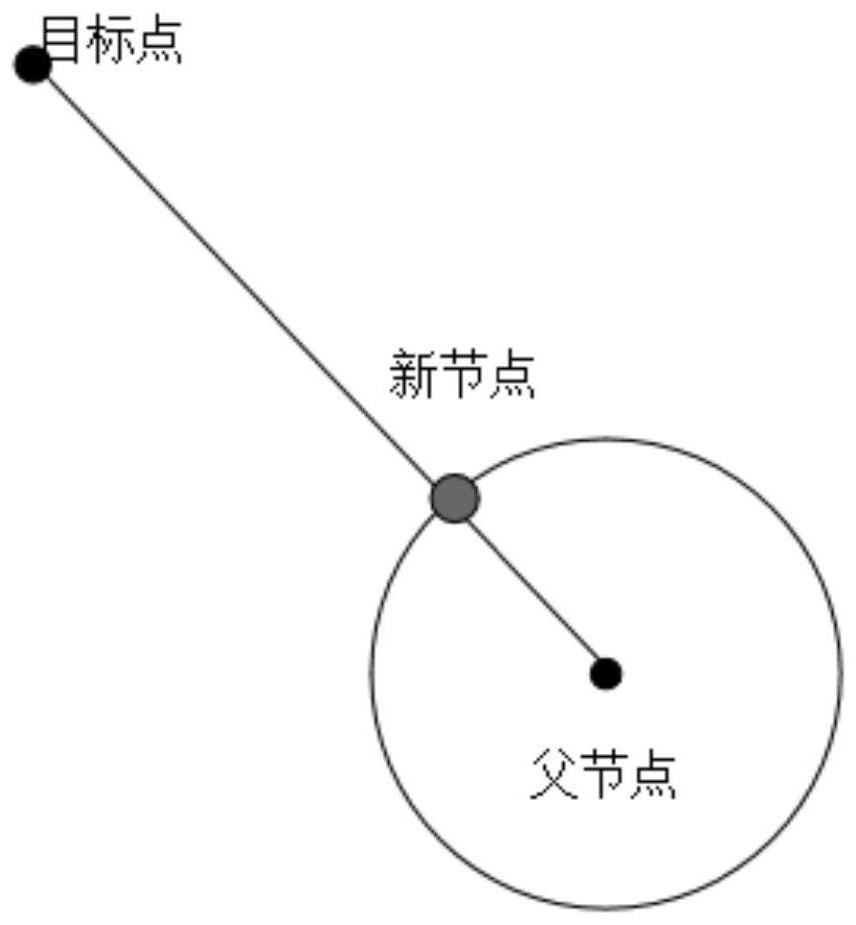
[0053] When there is no obstacle in the exploration range, the intersection point of the straight line connecting the starting point and the ending point and the circle is used as a new node;
[0054] means for making a circle with the node as the origin and the step size as the radius;
[0055] A device for reselecting a new node so that the resulting path is the shortest.
[0056] As a further improvement plan, it also includes:
[0057] When there is an obstacle in the exploration range, if the obstacle does not block the connection line between the target point and the starting point, ...
Embodiment 3
[0063] In one or more embodiments, a terminal device is disclosed, including a server, the server includes a memory, a processor, and a computer program stored on the memory and operable on the processor, and the processor executes the The program realizes the slime mold RRT navigation method based on two-dimensional static path planning in the first embodiment. For the sake of brevity, details are not repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More