

Multi-region logistics robot suitable for three-dimensional cultivation of plant factory, platform and operation method
A logistics robot and three-dimensional cultivation technology, applied in the field of intelligent agricultural machinery, can solve the problems that it is difficult to realize the high-efficiency operation requirements of plant factories, cannot meet the logistics requirements of plant factories, and is difficult to meet the aseptic production of plant factories, so as to achieve easy secondary development And the effect of function expansion, good support, and increased chassis weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, but the protection scope of the present invention is not limited thereto.
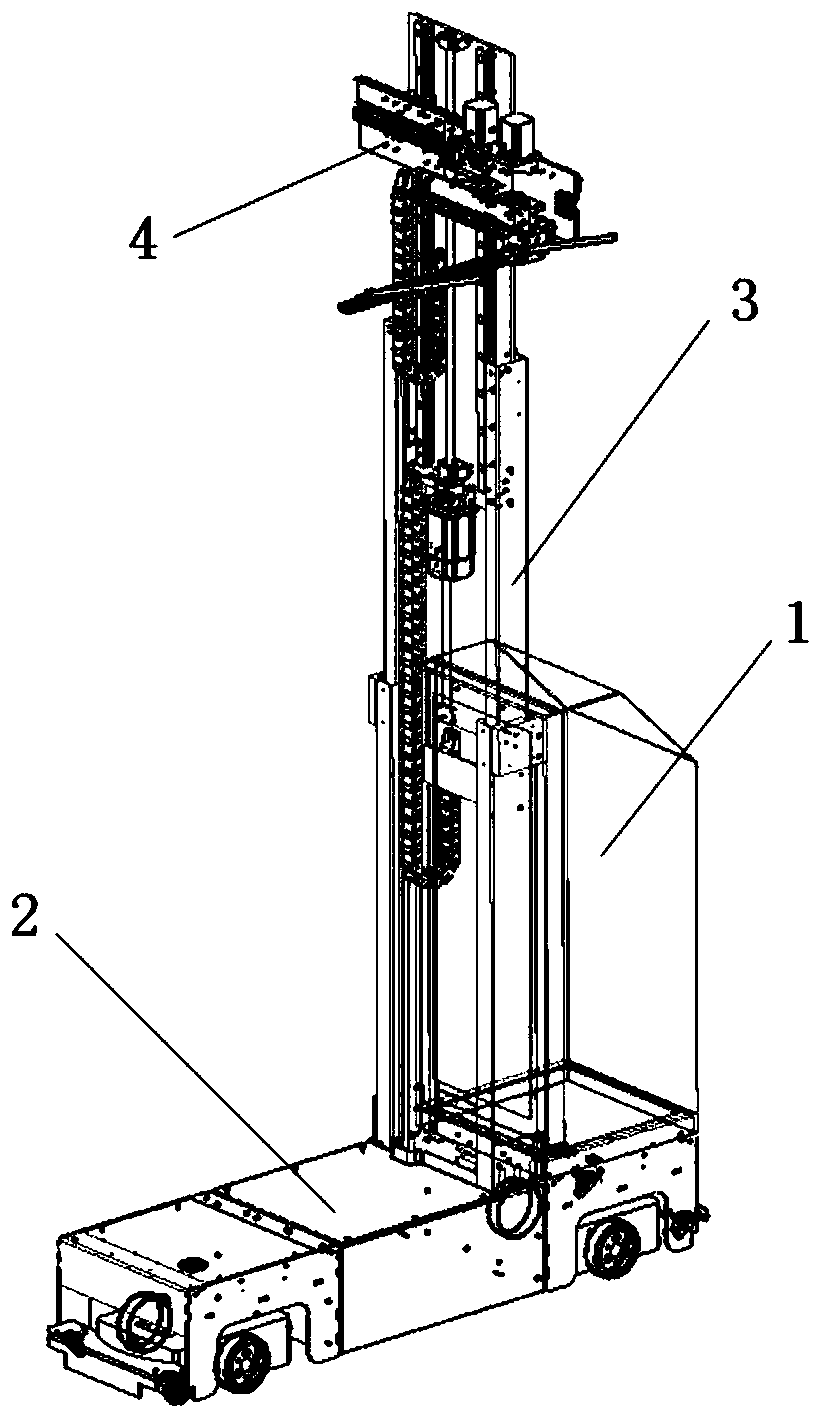
[0060] Such as image 3 As shown, the multi-zone logistics robot platform suitable for plant factory three-dimensional cultivation disclosed by the present invention includes a controller 1, a mobile chassis 2, a lifting device 3 and a translation insertion device 4. The controller is responsible for the movement of the platform and the control of pick-up and handling operations. The mobile chassis includes a navigation and obstacle avoidance device, which is responsible for driving the platform to walk, position and correct deviation according to the preset path. The high-lift lifting device includes a first-level lifting mechanism, a second-level lifting mechanism, a third-level lifting mechanism and a ball screw lifting mechanism. Among them, the first-level lifting m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More