

Piezocapacitance and piezoresistance coupled proximity sensing and contact force sensor
A sensor and contact force technology, which is applied in the measurement, instrument, and measurement force of the property force of piezoresistive materials. It can solve the problems of difficult to break through in response speed, complex measurement circuit, and parasitic capacitance, so as to increase contact perception. function, the effect of expanding the test range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
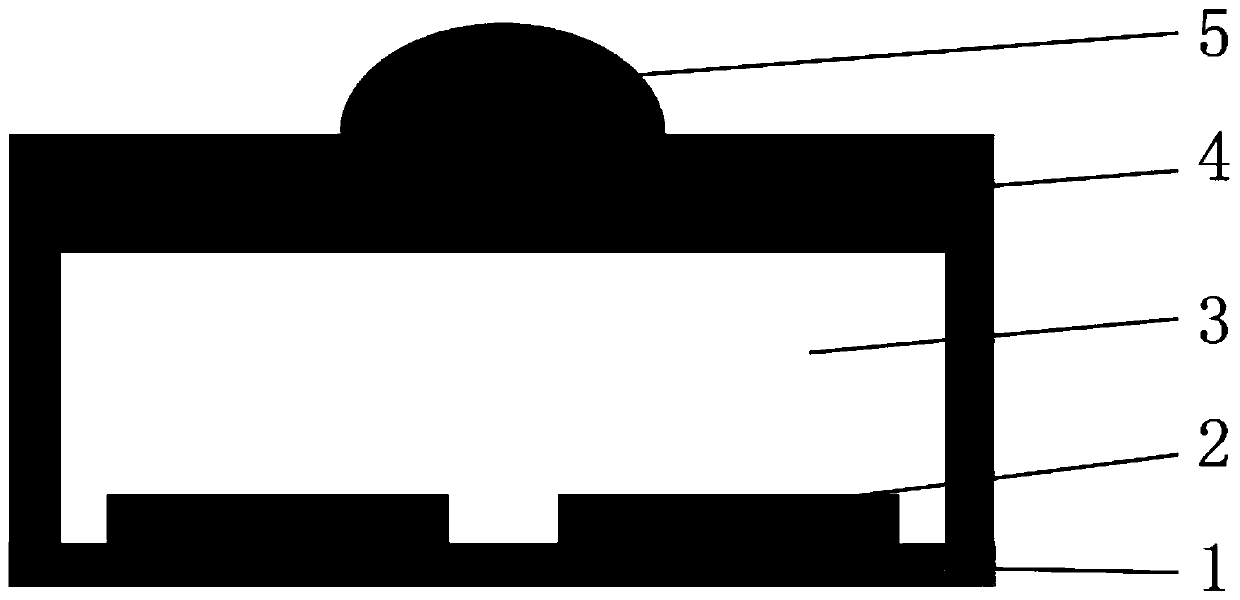
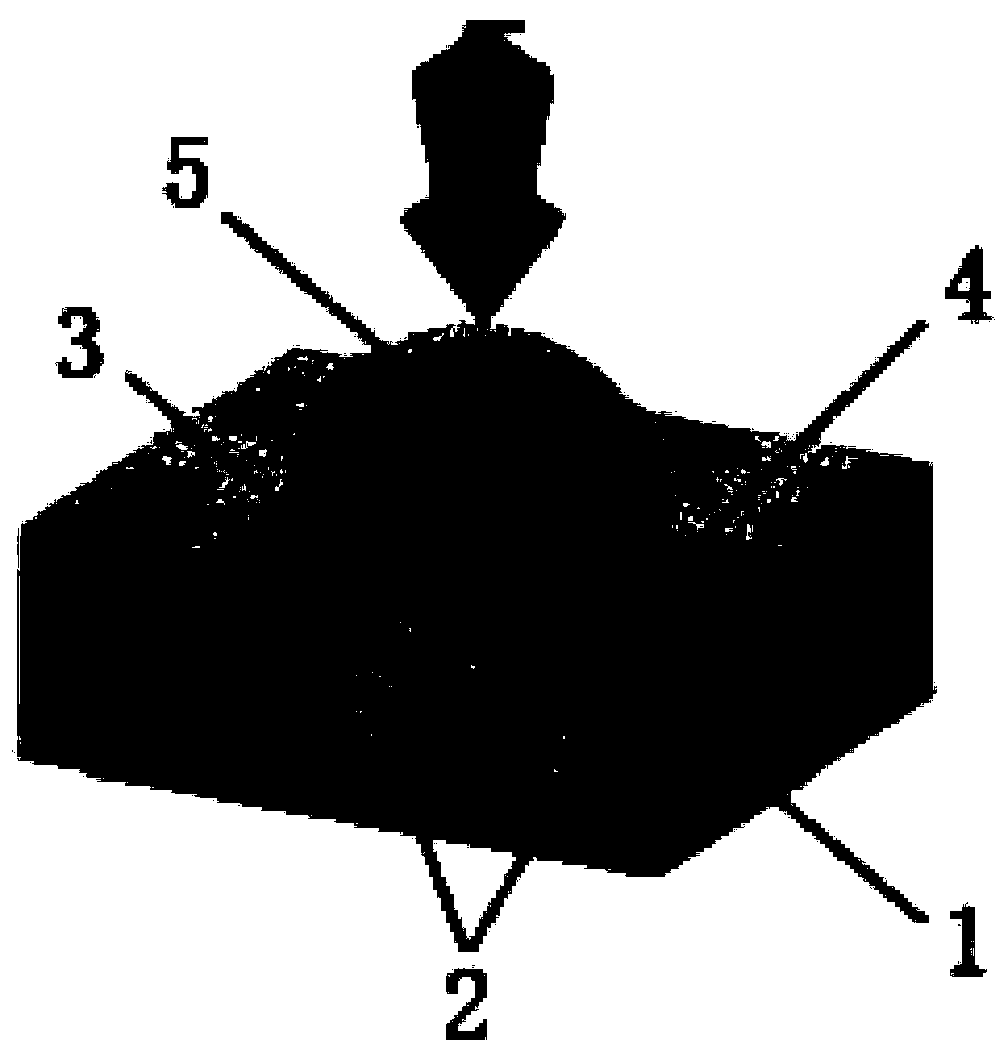
[0018] see Figure 1-4 Describe this embodiment, a proximity sensing and contact force sensor coupled with piezocapacitance and piezoresistive, which includes a flexible substrate 1, coplanar electrodes 2, piezoresistive elastic body 4 and surface protrusions 5, the flexible substrate 1 Located at the bottom, the coplanar electrode 2 is disposed on the flexible substrate 1, the piezoresistive elastomer 4 is a cavity structure, and the piezoresistive elastomer 4 is disposed above the flexible substrate 1 and the coplanar electrode 2, The piezoresistive elastomer 4 forms an air cavity 3 in the area enclosed by the flexible substrate 1, and the surface protrusion 5 is arranged on the upper surface of the piezoresistive elastomer 4. The piezoresistive elastomer 4 adopts low-dimensio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More