

Variable vector action duration-based permanent magnet synchronous motor current control method
A technology of permanent magnet synchronous motor and current control, which is applied in vector control system, motor generator control, electronic commutation motor control, etc. It can solve problems such as large torque fluctuation, limited switching state, and increased switching loss. Achieve steady state and dynamic performance improvement, good accuracy, reduce current fluctuation and current harmonic content
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] A method for controlling the current of a permanent magnet synchronous motor based on variable vector action duration, the method comprising the following steps:
[0050] 101: Use the zero-order hold discretization method to discretize the mathematical model of the permanent magnet motor, so that it still has better accuracy at a lower sampling frequency;
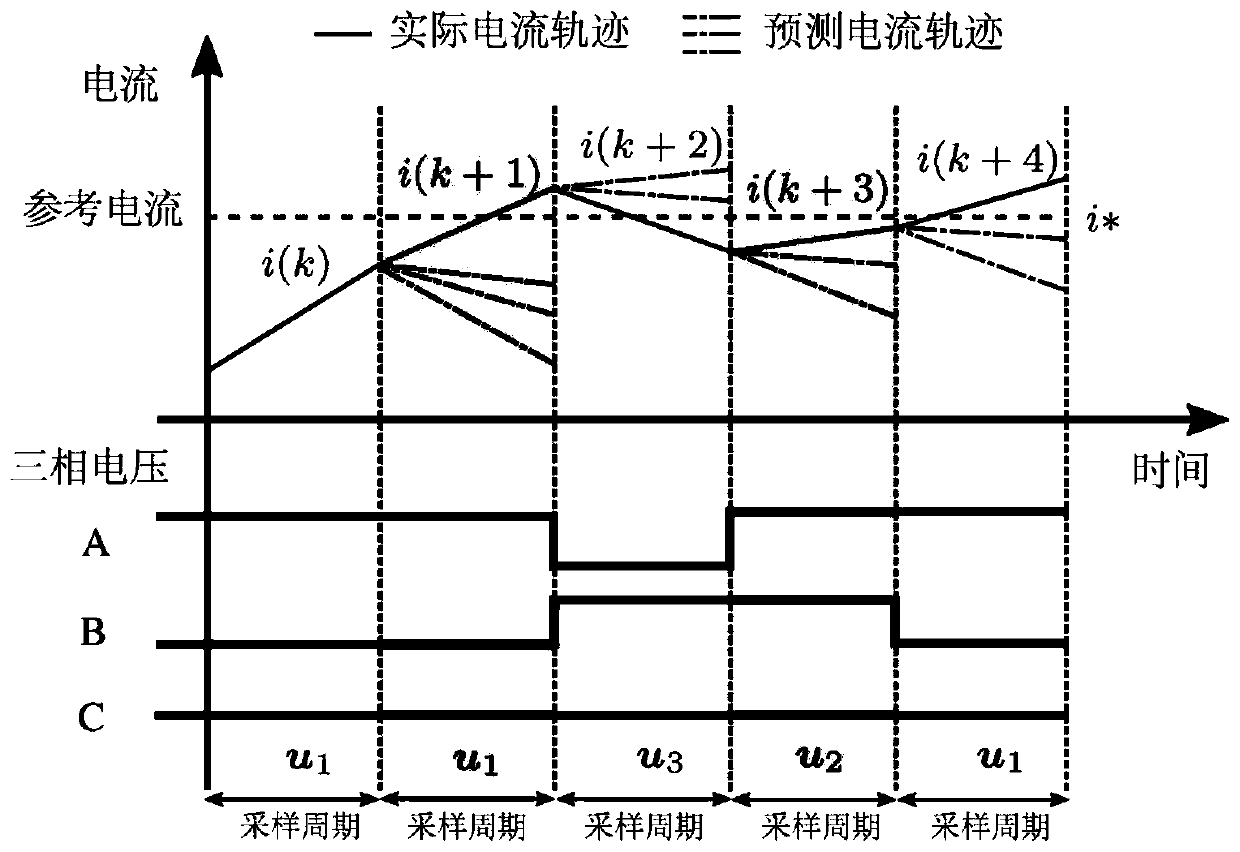
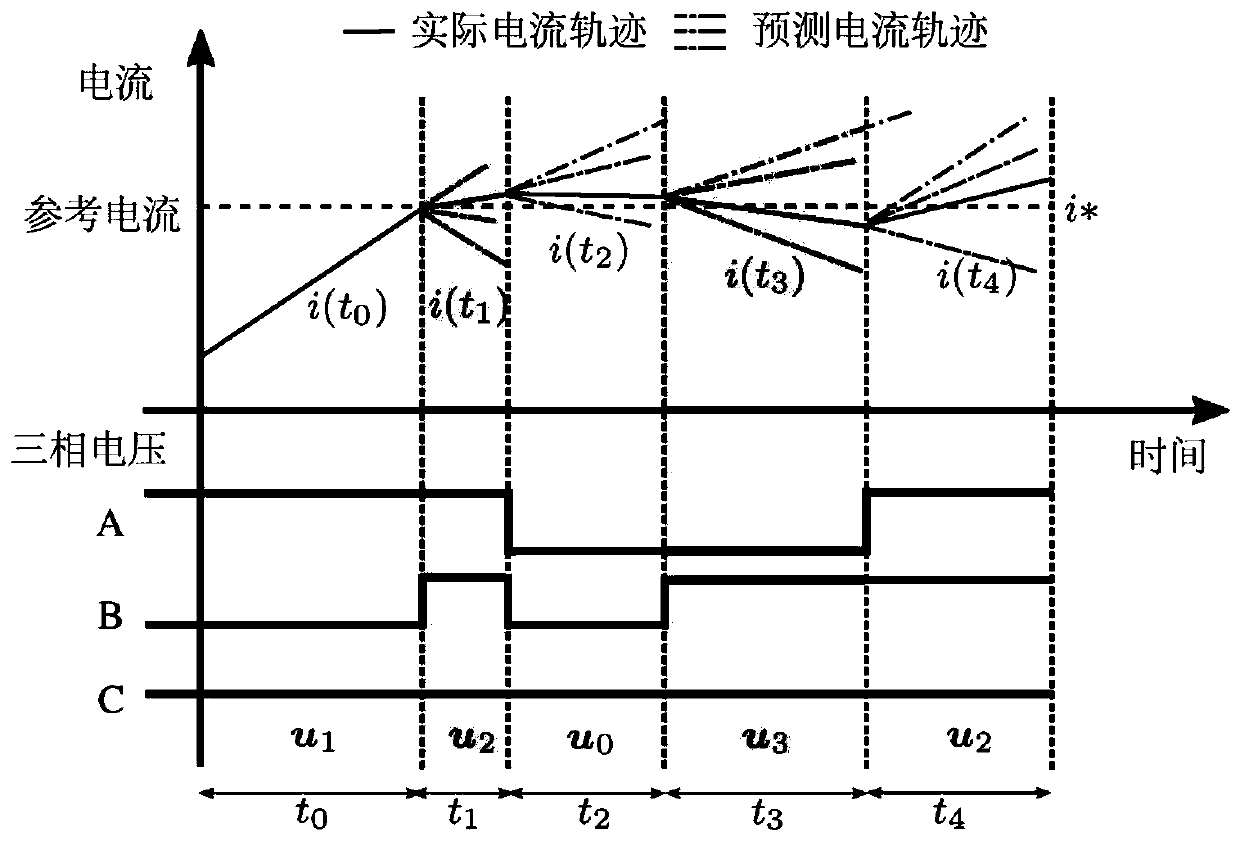
[0051] 102: Based on the precise zero-order hold discretization mathematical model of the permanent magnet synchronous motor, the dq axis current components are respectively expressed as functions of the vector action time t;
[0052] 103: Through mathematical calculation, the action time t corresponding to the minimum difference between the dq-axis current prediction value and the reference value is obtained opt , the obtained action time t opt And the corresponding candidate voltage vector is substituted into the cost function, and the voltage vector that minimizes the value of the cost function is selected as the...
Embodiment 2
[0055] The scheme in embodiment 1 is further introduced below in conjunction with specific calculation formulas and examples, see the following description for details:
[0056] In the subsequent variable representation: the vector will be expressed in bold, such as: stator current i s can be expressed as i s = i d +ji q , where i d is the d-axis current component, i q is the q-axis current component; in the stator coordinate system, the mathematical model of the surface-mounted permanent magnet motor can be expressed as:
[0057]
[0058] Among them, u s is the stator voltage vector, i s is the stator current vector, Ψ s is the stator flux vector, ψ r is the amplitude of the rotor flux linkage.
[0059] Among them, the corresponding matrix can be expressed as:
[0060]
[0061]
[0062] Among them, R s is the stator resistance, ω e is the rotor electrical angular velocity. In addition, since the present invention uses a surface-mounted permanent magnet s...
Embodiment 3
[0122] The proposed algorithm of the present invention is verified on a 2.3-kW permanent magnet synchronous motor, which is coaxially connected with a 3-kW load motor, and the load motor is controlled by Simens PM250. The proposed algorithm of the present invention is implemented by a TMS320F28379D digital signal processor (DSP). Experimental platform and detailed parameters such as Figure 6 and shown in Table 1. In order to be objective and fair, the comparison between the proposed algorithm and the traditional algorithm is carried out under the same switching frequency.
[0123] Table 1: Motor parameters
[0124]
[0125]
[0126] The first step is to compare the steady-state performance: the experimental conditions are: d-axis reference current and q-axis reference current are set to 0A and 5A respectively, the motor speed is 300r / min, and the average switching frequency is 2.7kHZ. Such as Figure 7 As shown, when the motor runs the traditional finite set model p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More