Electro-hydraulic servo system self-adaptive control method based on expansion disturbance observer
An electro-hydraulic servo system and self-adaptive control technology, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve the severe chattering of sliding mode surface, discontinuous sliding mode control law, and reduced control performance. and other problems, to achieve accurate transient tracking performance, superior tracking performance, and control chattering problems to avoid the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
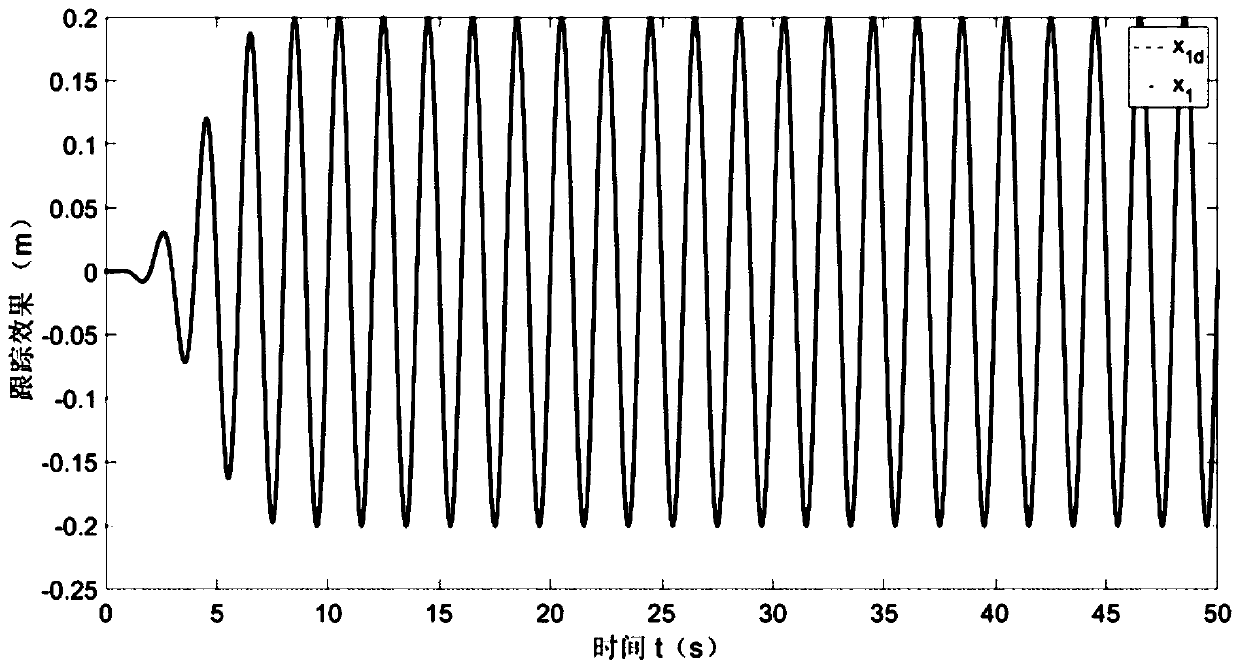
[0131] In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the electro-hydraulic servo system:
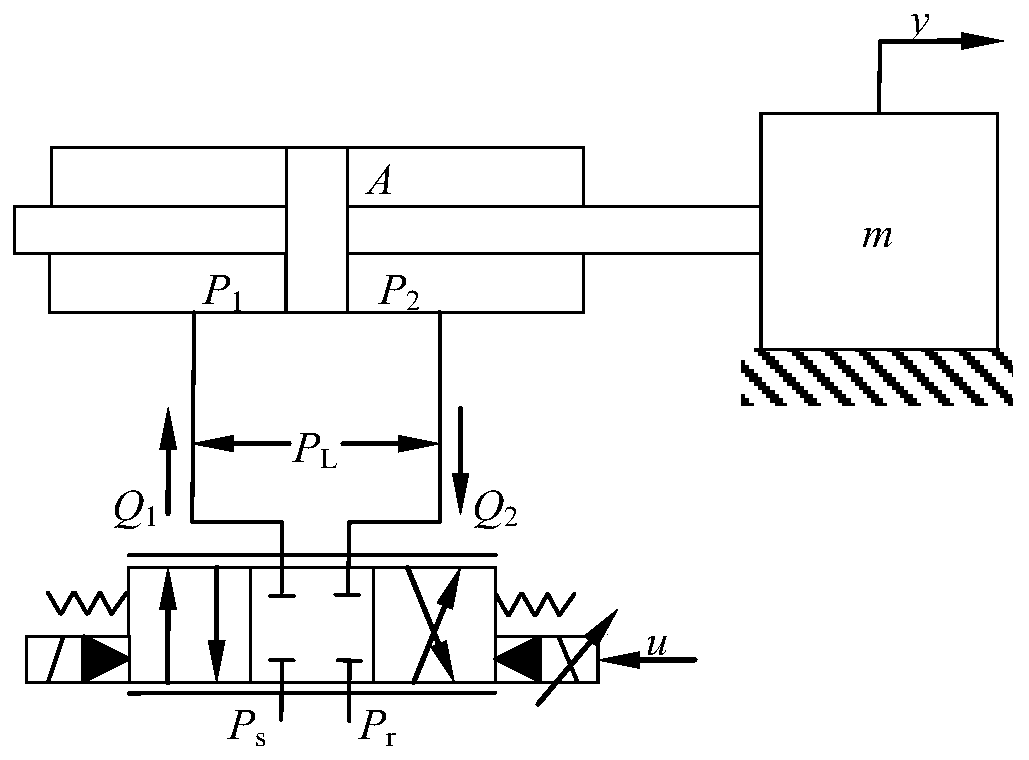
[0132] Load m=40kg, viscous friction coefficient B=80N s / m, hydraulic cylinder piston effective area A=2×10 -4 m 2 , Coulomb friction value A f =10N·s / m, oil elastic modulus β e =2×10 8 Pa, internal leakage coefficient C t =9×10 -12 m 5 / (N s), input gain The total volume V of the oil supply chamber and the oil return chamber of the hydraulic cylinder t =2×10 -3 m 3 , oil supply pressure P s =21MPa, return oil pressure P r = 0 Pa.
[0133] Continuous shape function S f (x 2 ) = arctan(100x 2 ).True value of the parameter to be estimated θ=[2,0.25,0.08,400,3.6] T , the bounds of the predictive parameter estimates are θ max =[5,1,0.2,500,10] T , and θ min =[0,0,0.05,0,0] T .The initial value of parameter estimation is selected as It satisfies the condition of (10) and is far away from the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More