

Industrial part intelligent identification and sorting system based on computer vision
A computer vision and intelligent recognition technology, applied in sorting, manipulators, manufacturing tools, etc., can solve problems affecting production efficiency, slow sorting speed, and low efficiency, so as to improve the probability of successful grabbing, reduce manual participation, The effect of ensuring human-machine safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
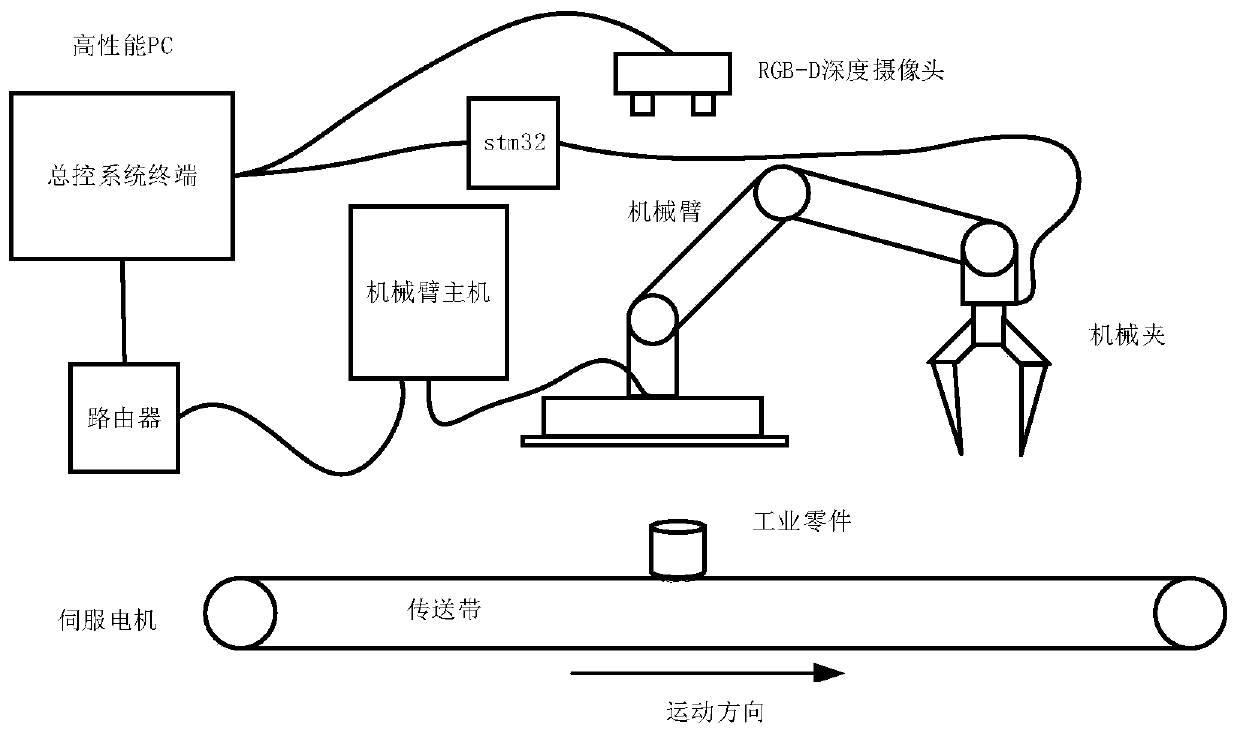
[0025] The specific hardware used in the embodiment is:
[0026] The master control system terminal is a high-performance PC equipped with GPU;
[0027] The robotic arm is the terminal robotic arm of the UR5 master control system;
[0028] The main machine of the mechanical clamp is a stm32 single-chip microcomputer;
[0029] The image collector is a RealScene D435 depth camera, and is equipped with four soft light LED light sources around it to eliminate the light and shadow effects of the objects to be sorted and provide stable lighting conditions to obtain a clearer image of the items to be sorted.
[0030] The host of the mechanical arm and the host of the mechanical clamp communicate with the terminal of the master control system using the TCP protocol. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More