

Long-stroke heavy-load high-precision multi-angle truss hybrid robot
A robot, high-precision technology, applied in the field of robotics, can solve the problems of high use and maintenance costs, high cost, integration complexity, etc., and achieve the effect of reducing production and operating costs, taking up less space, and reducing manufacturing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be described in detail below in conjunction with specific embodiments.
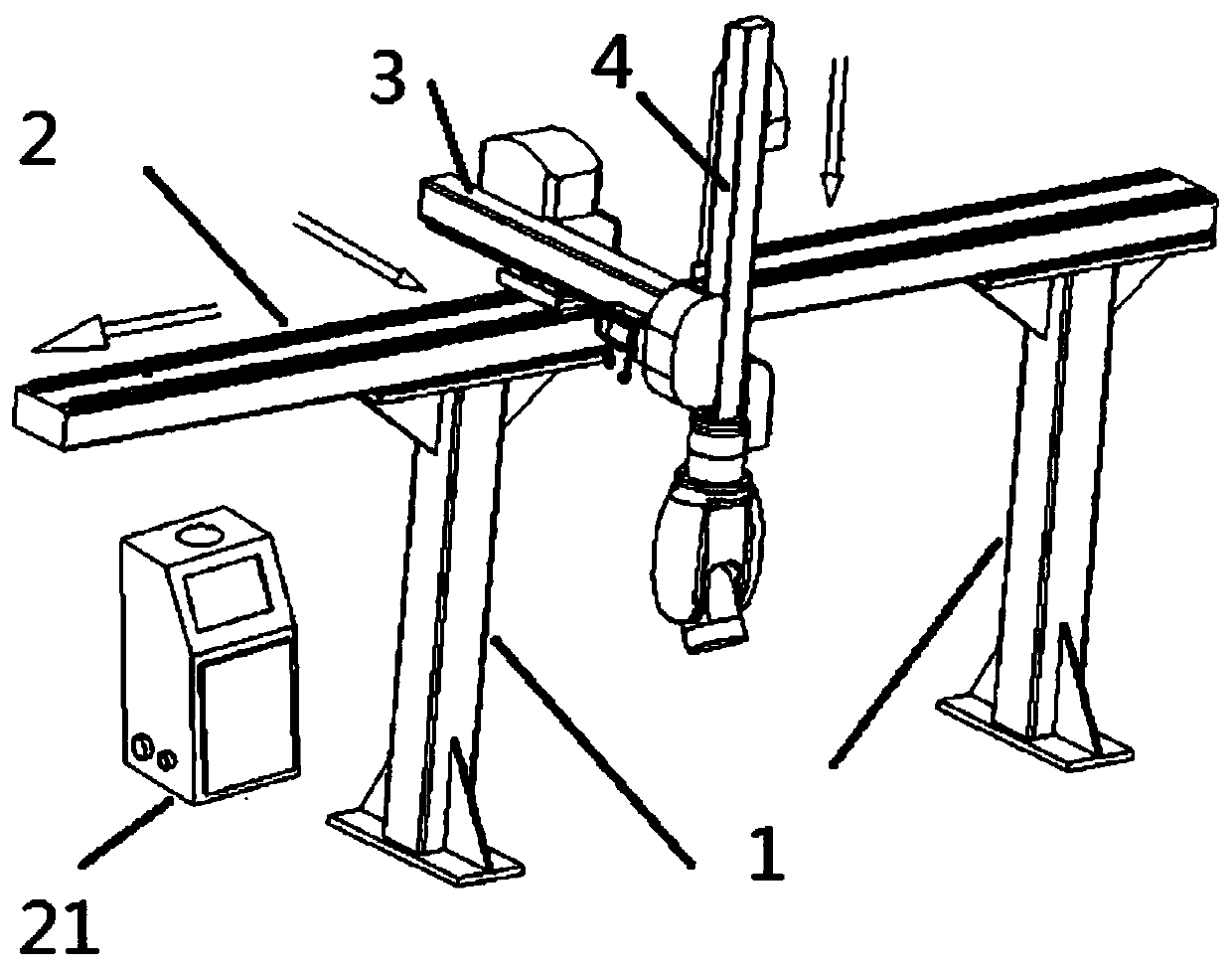
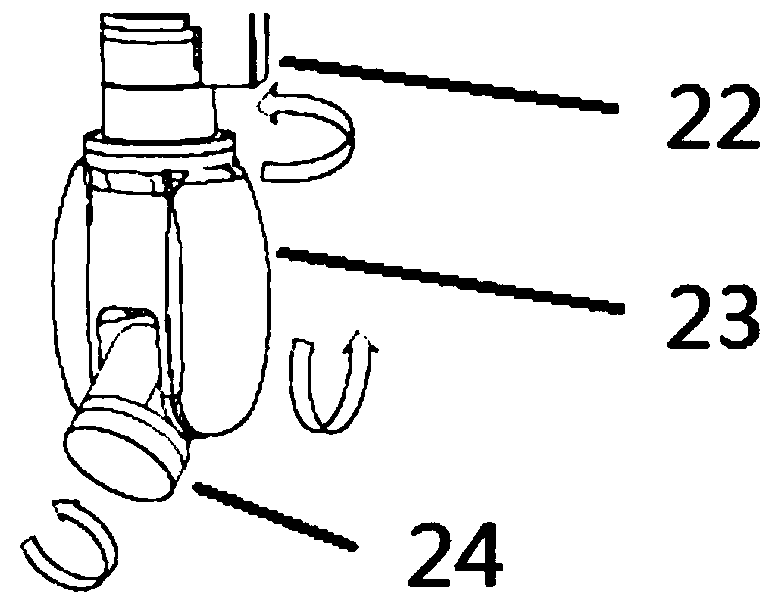
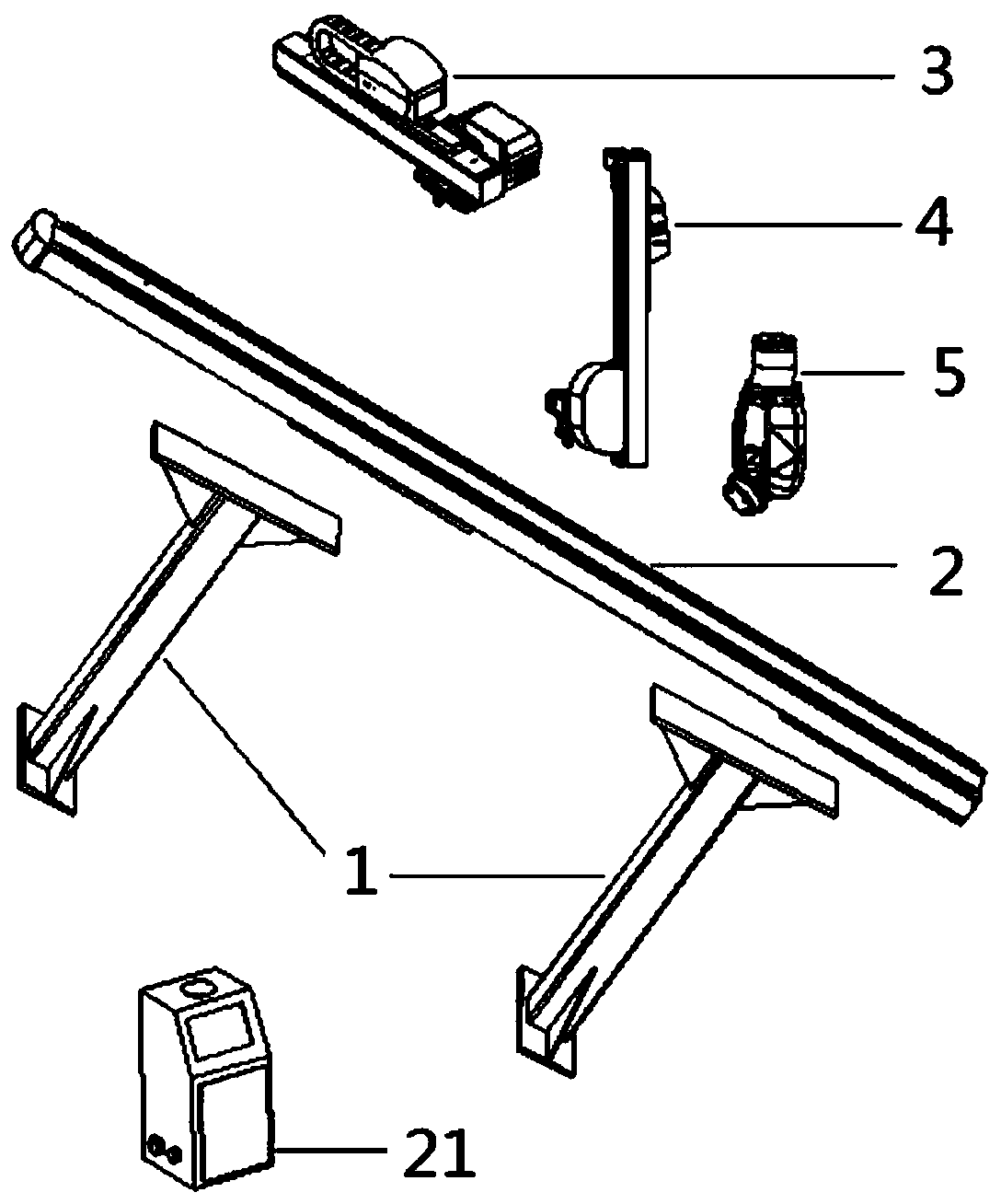
[0018] Such as Figure 1 to Figure 3 As shown, it is a long-stroke heavy-load high-precision multi-angle truss hybrid robot in accordance with the present invention, which includes a column (truss support) 1, an X axis (transverse entry and exit) 2, a Y axis (forward and backward) 3, and a Z axis. Axis (up and down) 4, rotary joint ABC axis (rotation and warping posture) 5, electric control unit 21.
[0019] The base of the truss hybrid robot adopts two columns 1 (a double truss support system that can be further expanded to four columns) to support the moving parts of its entire robot;
[0020] The X-axis 2 is the main beam on the column 1. The X-axis 2 can be lengthened or shortened according to actual needs and site space constraints. The common stroke range is within 0.5m to 10m, and can be further extended by splicing To more than 30 meters, the X-axis 2 completes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More