

Autonomous navigation system for border security unmanned patrol vehicle
An autonomous navigation system, patrol car technology, applied in the control/adjustment system, two-dimensional position/channel control, vehicle position/route/altitude control and other directions, can solve the problem that the autonomous navigation system cannot satisfy high-speed, two-way and safe autonomy at the same time problems such as driving, to achieve the effect of eliminating blind spots for environmental detection, meeting the needs of large-scale patrol operations, and shortening the mapping cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0091] This embodiment provides an autonomous navigation system for an unmanned patrol vehicle for perimeter security, and the specific technical solution is as follows:
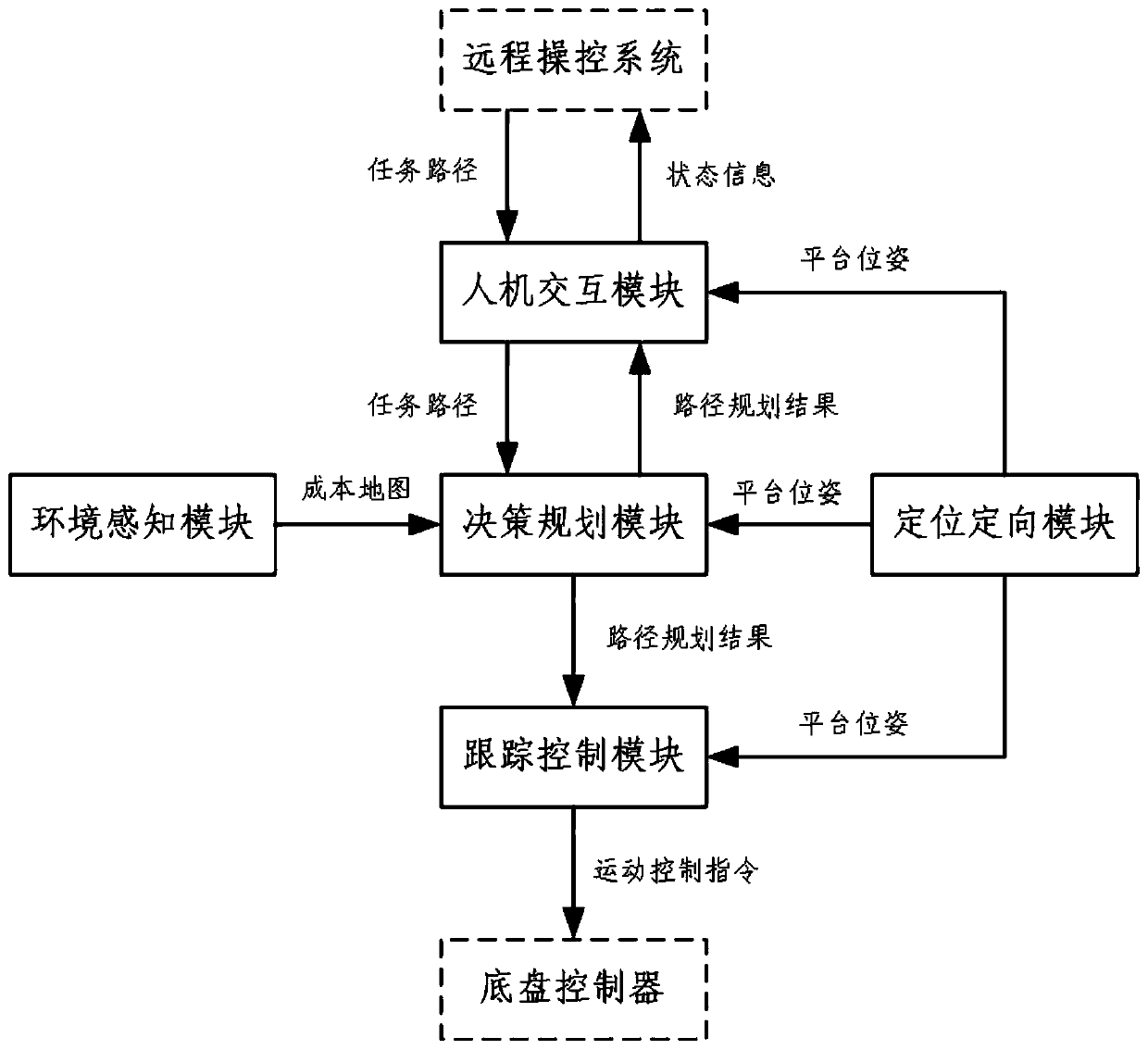
[0092] The system is composed of man-machine interface module, environment perception module, positioning and orientation module, decision-making planning module and tracking control module. The hardware configuration includes perception sensor, high-precision positioning device and control computer. The software components of each module are deployed on the control computer. The software adopts a distributed architecture. If necessary, the software components of different modules exchange information through the subscription / publishing mechanism of the communication middleware.
[0093] The human-machine interface module realizes the information interaction between the autonomous navigation system and the remote control system. On the one hand, it receives the mission path from the remote control system, and...
Embodiment 2
[0105] like figure 1 As shown, the autonomous navigation system of the perimeter security unmanned patrol vehicle provided in this embodiment is composed of five functional modules, including a man-machine interface module, an environment perception module, a positioning and orientation module, a decision-making and planning module, and a tracking and control module. The system is upwardly connected with the remote control system of the perimeter security unmanned patrol car, and downwardly connected with the chassis controller of the patrol car maneuvering system.
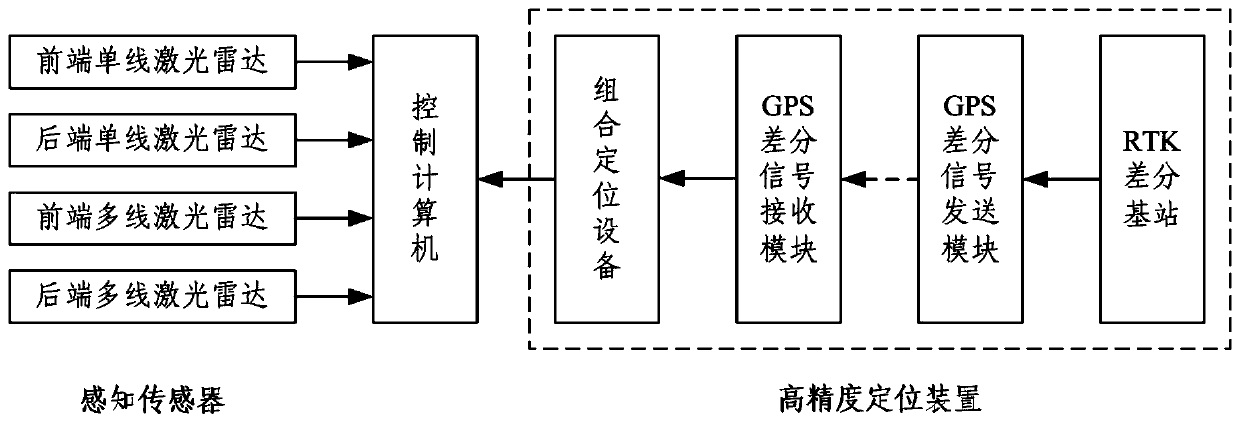
[0106] like figure 2 As shown, the hardware configuration of the autonomous navigation system includes perception sensors, control computers and high-precision positioning devices.
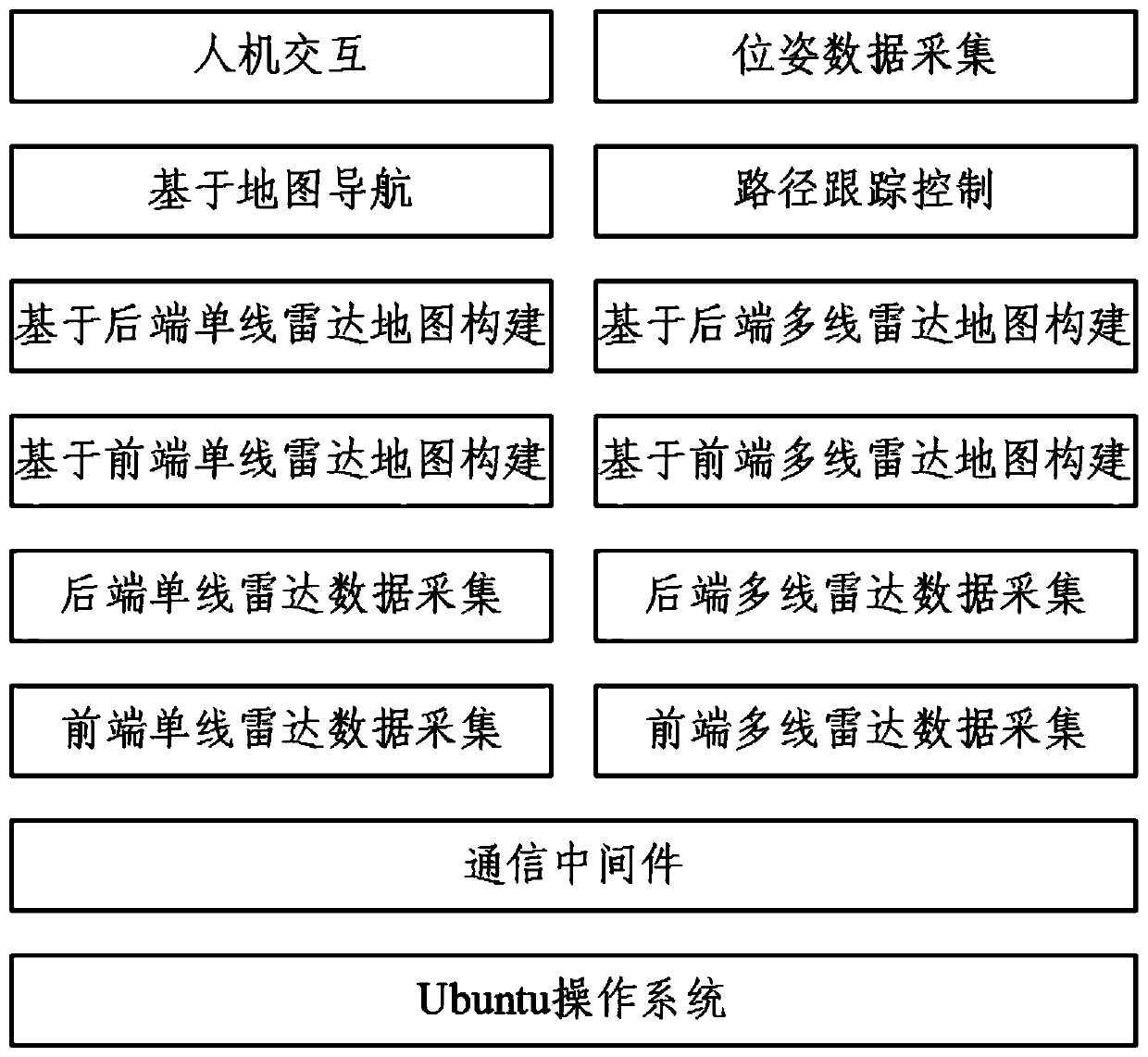
[0107] like image 3 As shown, the autonomous navigation system software adopts a distributed architecture, including man-machine interface, pose data acquisition, front-end single-line radar data acquisition, front-end multi-line ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More