High-speed high-efficiency high-voltage half-bridge gate drive circuit
A gate drive circuit and output drive circuit technology, which is applied in the field of high-speed, high-efficiency, high-voltage half-bridge gate drive circuits, can solve the problems of reducing the switching frequency of the system, increasing the damage of the switch, and increasing the driving delay.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The present invention will be described in further detail below in conjunction with the accompanying drawings and examples.
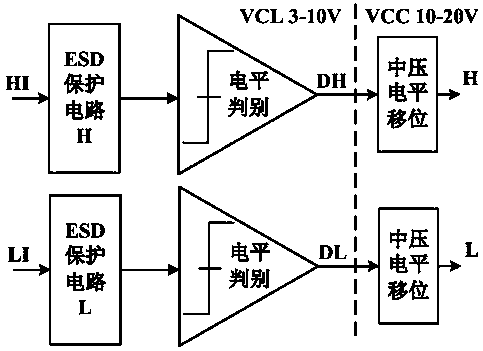
[0050] figure 1 It is a structural block diagram of a high-speed, high-efficiency, high-voltage half-bridge gate drive circuit of the present invention. The high-speed and high-efficiency high-voltage half-bridge gate drive circuit includes an input receiving circuit, a dead-time generating circuit, a low-voltage generating circuit, a low-side delay circuit, a low-side high-efficiency output drive circuit L, and a low-delay high-voltage level shift circuit And high-side high-efficiency output drive circuit H.
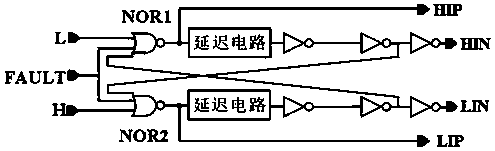
[0051] Among them, the low-voltage digital input signals HI and HI first enter the input receiving circuit, and perform signal level discrimination and logic level high-voltage conversion to obtain medium-voltage signals H and L; the dead-time generation circuit obtains high-side differential input according to the medium-voltage signal H...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



