

Map generation and navigation obstacle avoidance method based on automatic driving platform
A map generation and automatic driving technology, applied in surveying and mapping, navigation, navigation, navigation computing tools, etc., can solve the problems of lack of map information, map dislocation, high system resource occupancy, etc., to improve the effect, avoid map dislocation, and improve operating efficiency high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
[0048] The scheme in embodiment 1 is further introduced below in conjunction with specific calculation formulas and examples, see the following description for details:
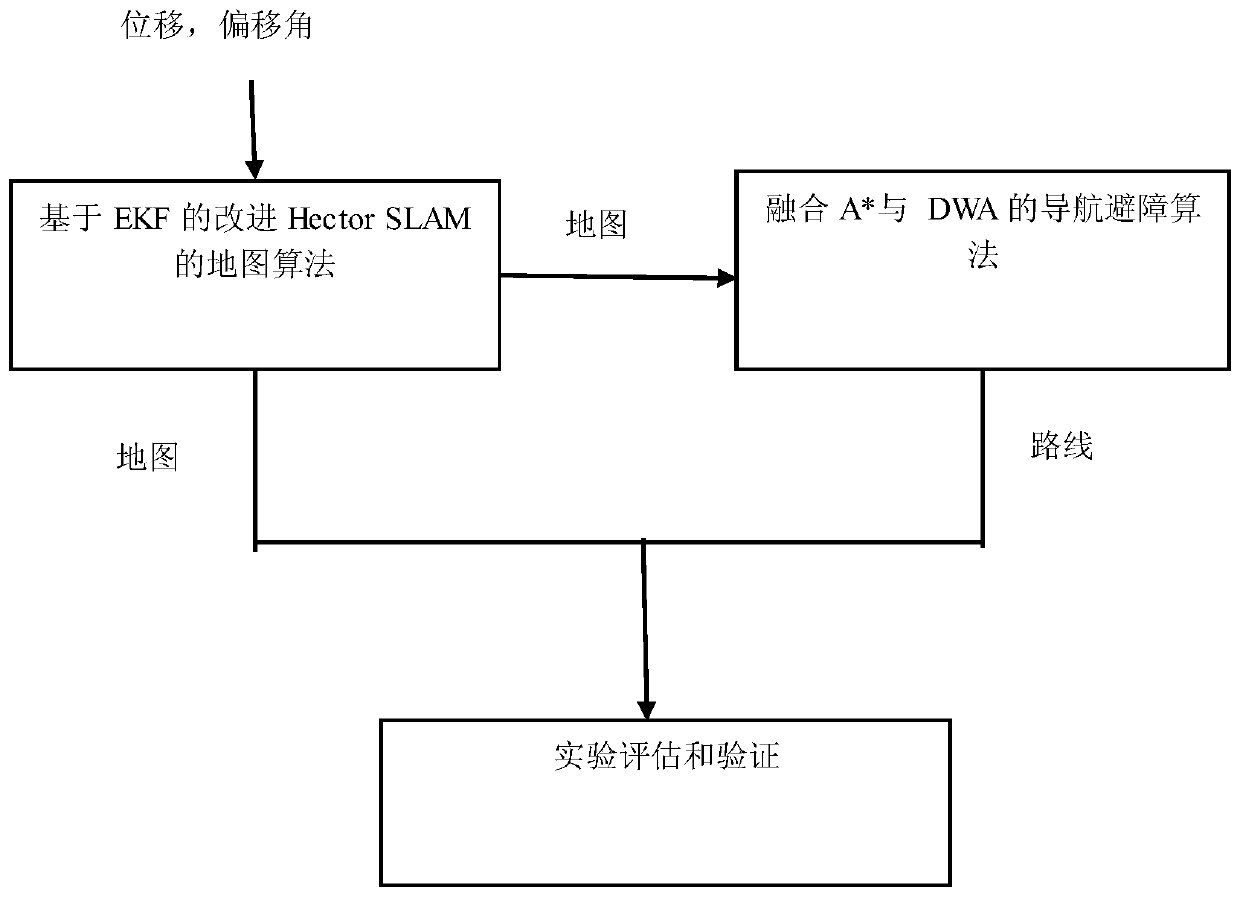
[0049] The map generation algorithm is an improved Hector SLAM algorithm based on EKF, and the navigation obstacle avoidance algorithm is a navigation obstacle avoidance algorithm that combines A* and DWA, including:
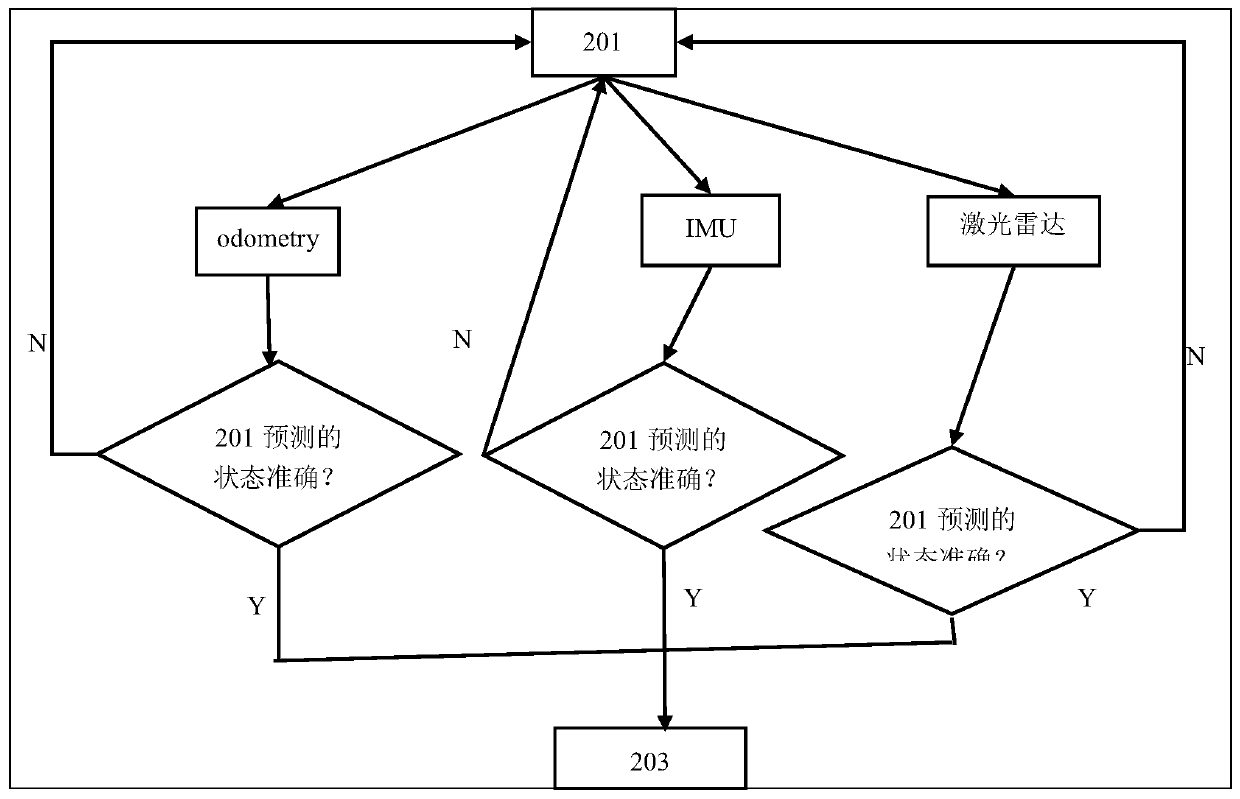
[0050] Step 201: use EKF to fuse the data of wheel odometry (odometry), inertial measurement unit (Inertial Measurement Unit, IMU), and laser radar (Lidar) to obtain new fused odometry data;
[0051] In the specific implementation, odometry is used to initialize the system state quantity and covariance matrix. The covariance matrix is initialized to a non-zero matrix, and the system input is initialized to [0,0] T . Monitor the information of each sensor and odometry through the rostopic command of the robot operating system (ROS). system input [u 1 , u 2 ] T It is the displacement and ...
Embodiment 3
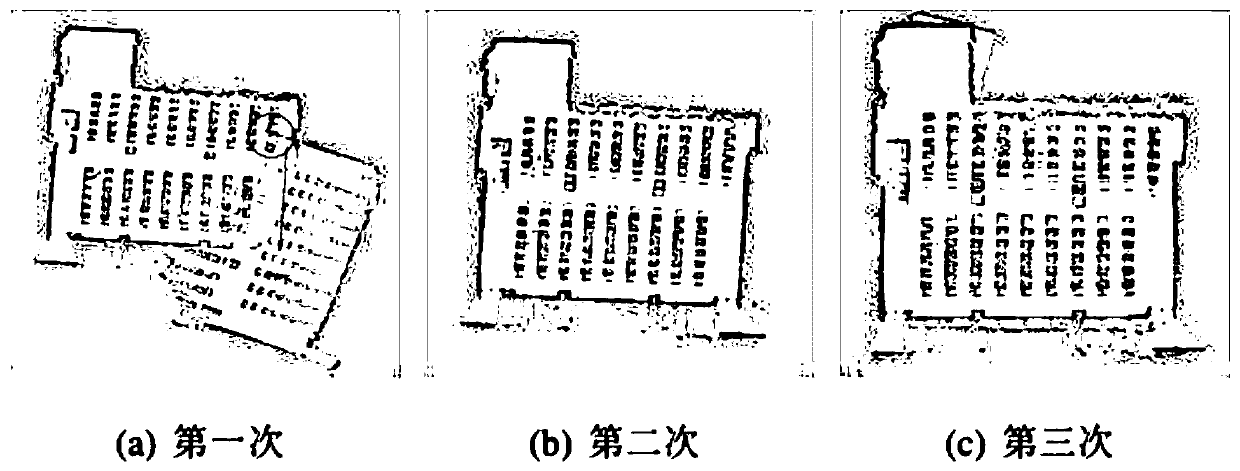
[0092] The map generation algorithm proposed by the present invention is an improved Hector SLAM algorithm based on EKF. In the experiment of the map generation algorithm for automatic driving, the evaluation of the algorithm is carried out by analyzing the effect of the generated map.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More