

Yaw control method, device, and unit for double-impeller floating wind power generating set
A technology of wind turbine and yaw control, which is applied to the control of wind turbines, wind turbines, engine control, etc., and can solve problems such as consumption, increased cost of wind turbines, and poor response immediacy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
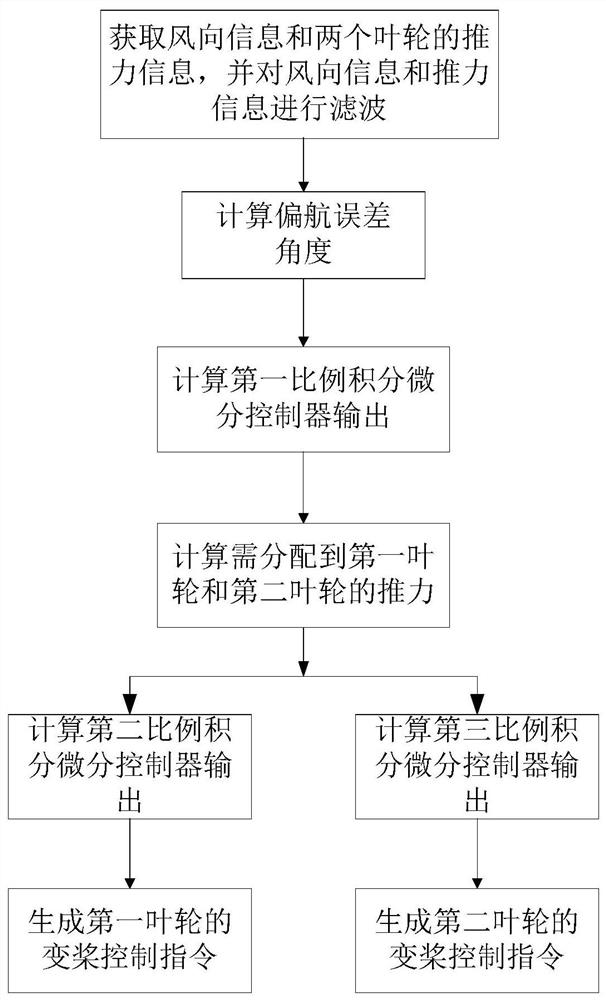
[0053] This embodiment discloses a yaw control method of a double-blade floating wind power generating set, such as figure 1 As shown, the steps are as follows:
[0054] S1. Obtain the wind direction information and the thrust information of the two impellers, and use a low-pass filter or a combination of a low-pass filter and a notch filter to filter the wind direction information and thrust information, and filter out the high-frequency interference in the wind direction information and thrust information. Signal.
[0055] The wind direction information can be directly detected by the laser radar wind sensor or the ultrasonic sensor, and can also be converted according to the wind speed. The thrust information can be directly detected by the thrust sensor, or can be obtained by further calculation of the sensor detection data, such as the indirect calculation of the thrust by using the measurement signals of the front and rear acceleration of the tower, the generator speed ...
Embodiment 2
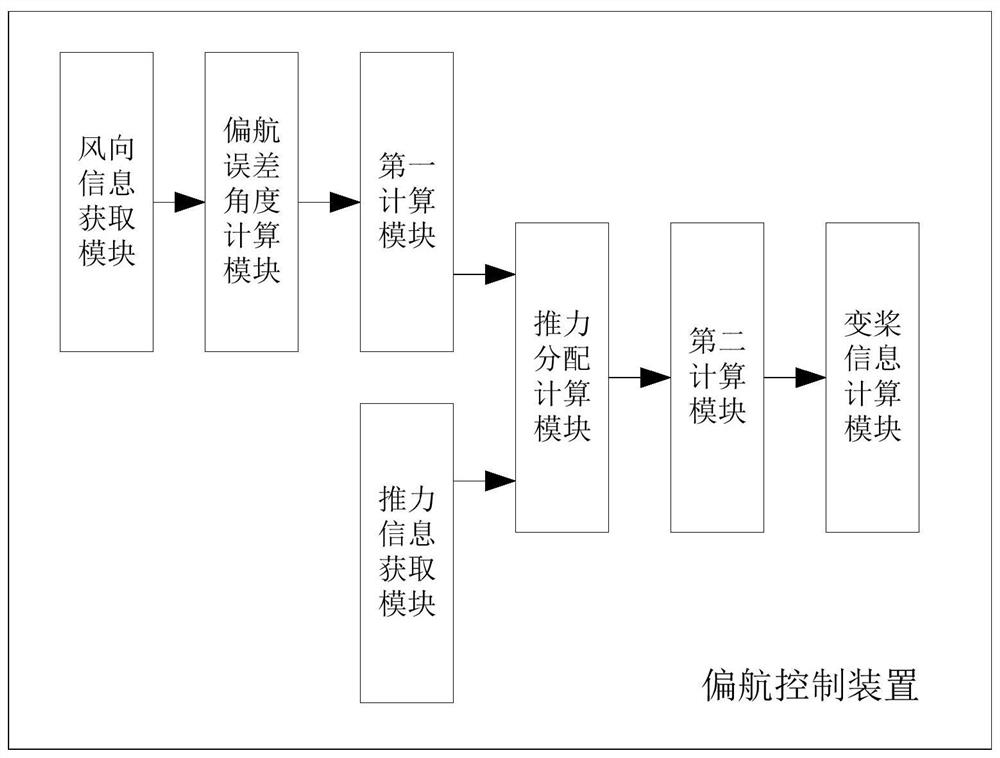
[0071] This embodiment discloses a yaw control device for a double-blade floating wind turbine, such as figure 2 As shown, it includes a wind direction information acquisition module, a thrust information acquisition module, a yaw error angle calculation module, a first calculation module, a thrust distribution calculation module, a second calculation module and a pitch information calculation module.
[0072] Wherein, the wind direction information acquiring module is used for acquiring wind direction information and filtering the wind direction information.
[0073] The thrust information acquisition module is used to acquire the thrust information of the two impellers, and filter the thrust information. Both wind direction information and thrust information can be obtained from relevant sensors on the generator set.
[0074] The yaw error angle calculation module is used to calculate the angle between the wind direction and the nacelle, that is, the yaw error angle, from ...
Embodiment 3
[0090] This embodiment discloses a storage medium, which stores a program. When the program is executed by a processor, the yaw control method of the double-blade floating wind power generation set described in Embodiment 1 is implemented, specifically as follows:
[0091] S1. Obtain wind direction information and thrust information of the two impellers, and filter the wind direction information and thrust information;
[0092] S2. Calculate the angle between the wind direction and the cabin from the filtered wind direction information, that is, the yaw error angle;
[0093] S3, using the yaw error angle as the first proportional integral differential controller P D (t) input, calculate the first proportional-integral-derivative controller P D output of (t);
[0094] The expression of the first proportional-integral-derivative controller is:
[0095]
[0096] Among them, K Py is the proportionality factor, K Iy is the integral coefficient, K Dy is the differential coe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More