Navigation positioning device and method in spacecraft cluster ground simulation system
A ground simulation, navigation and positioning technology, applied in measurement devices, navigation calculation tools, and optical devices, etc., can solve problems such as being susceptible to interference, and achieve the effect of improving anti-interference ability, increasing operating speed, and reducing the amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
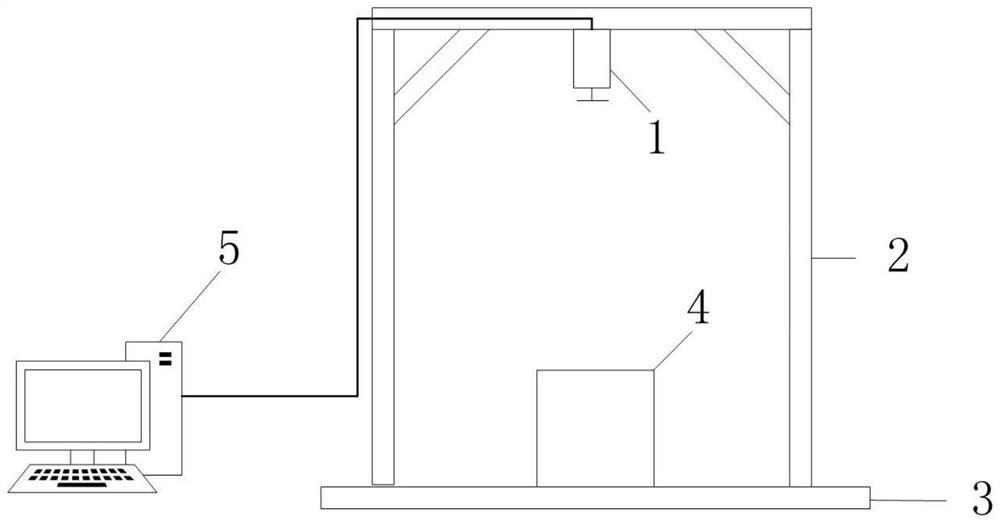
[0035] Such as figure 1 As shown, the spacecraft cluster navigation and positioning device consists of an industrial camera 1 , a camera bracket 2 , a test bench 3 , a moving target 4 and a pose measurement PC 5 . Among them, the industrial camera 1 lens is equipped with a red filter, the camera bracket 2 is fixedly connected with the industrial camera 1, and is used to support the industrial camera 1, and the moving target 4 performs one-dimensional rotation and two-dimensional translation on the test bench 3. The industrial camera 1. Collect the image containing the moving target 4 and transmit it to the pose measurement PC 5. The pose measurement PC 5 calculates the pose information of the moving target 4 in the three-dimensional space according to the two-dimensional coordinates of the image.
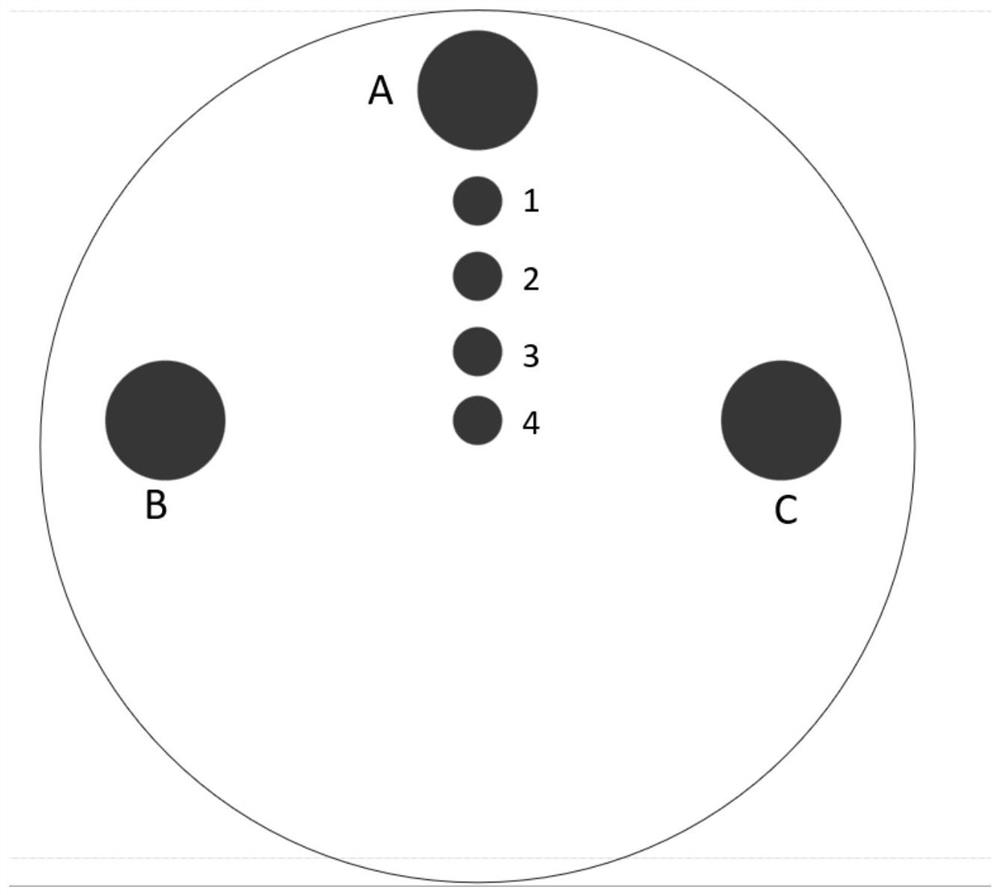
[0036] Such as figure 2 As shown, the target is fixedly connected to the moving target 4, and the target on the moving target 4 is composed of seven red LED lights, and the red fi...
Embodiment 2
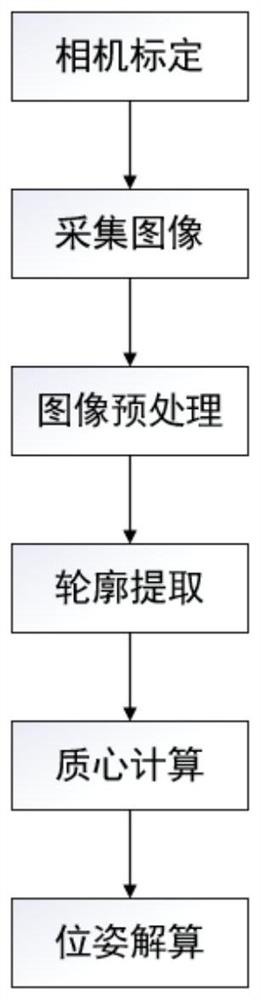
[0038] The pose measurement process of moving target is as follows: image 3 shown, including the following steps:
[0039] Step 1: Camera Calibration
[0040] Camera calibration is required before starting image acquisition. The imaging process of the camera is analyzed, and the pinhole imaging model of the camera is established without considering the lens distortion.
[0041] According to the principle of similar triangles, the transformation relationship between the homogeneous coordinates in the camera coordinate system and the homogeneous coordinates in the image plane coordinate system can be obtained
[0042]
[0043] where (X,Y,1)T is the homogeneous coordinate of the image P' formed by the space point P in the image plane coordinate system,
[0044] (X C ,Y C ,Z C ,1) T is the homogeneous coordinate of the spatial point P in the camera coordinate system, and f is the focal length of the camera lens.
[0045] The homogeneous coordinates of the space point P...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More