

A Model Identification and Adaptive Control Method for Hydraulic Manipulator
A technology of adaptive control and model identification, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of unstable hydraulic parameters, lack of identification accuracy, error convergence speed, and lack of precision, etc., to achieve stable control , Solve uncertainty and external interference, and avoid the effect of redundant input saturation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
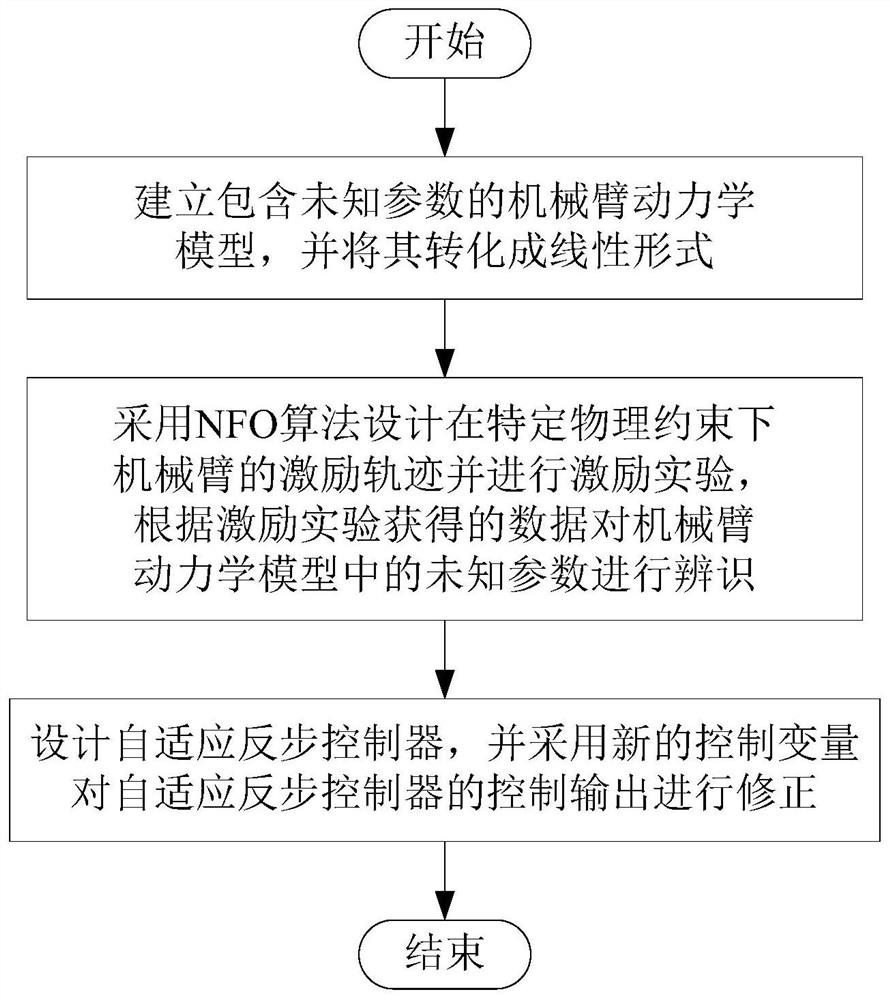
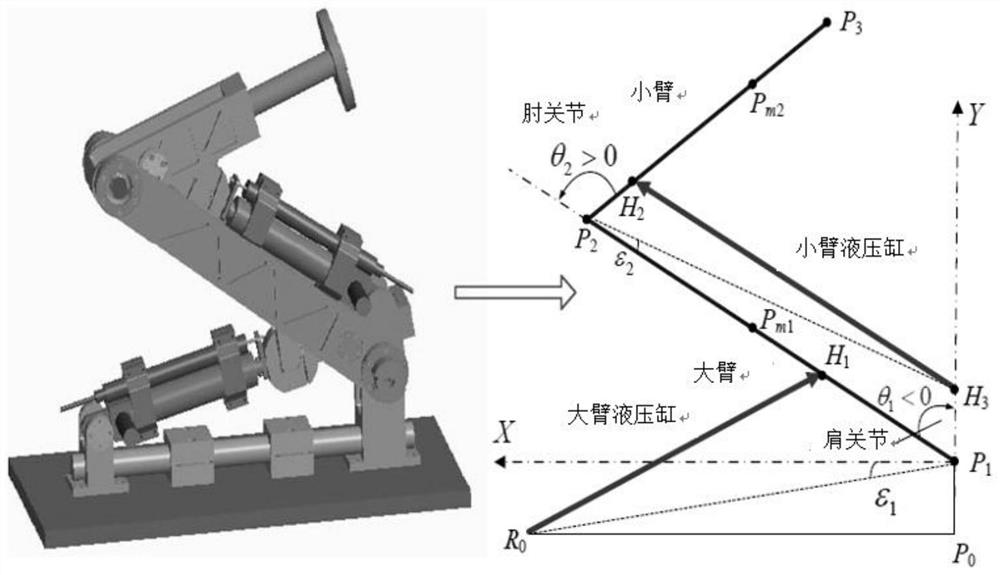
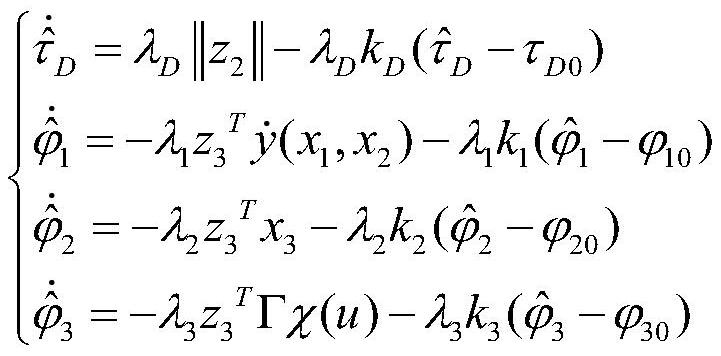
[0035] For this stage in the field of hydraulic control manipulator, manipulator dynamics model inaccuracies, electro-hydraulic servo system parameter fluctuations and the presence of external disturbances related issues. The present invention utilizes the torque and the joint angle information, using neighborhood optimization algorithm (the NFO) of the two degree of freedom model parameters Lagrange hydraulic manipulator is identified. NFO fitness function is designed to optimize the torque estimation least square error, thereby obtaining the total estimated parameters set with high accuracy. Then, based on the identification model, the design parameters of the adaptive backstepping controller to deal with uncertainty and disturbance electro-hydraulic parameters. In addition, we redesign a new stable control variable, in order to avoid redundant input hydraulic actuator saturation.
[0036]The present invention first establishes a second-order Lagrange model model of a robot arm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More