

Nonlinear current simulation and robust control method of motor simulator
A nonlinear current and motor simulation technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of parameter drift, high requirements, inability to achieve dynamic performance, etc., to achieve improved dynamic response speed, The effect of reducing the debugging workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The application of the present invention on a motor simulator will be further described below in conjunction with the embodiments shown in the accompanying drawings, so as to help those skilled in the art further understand the present invention.
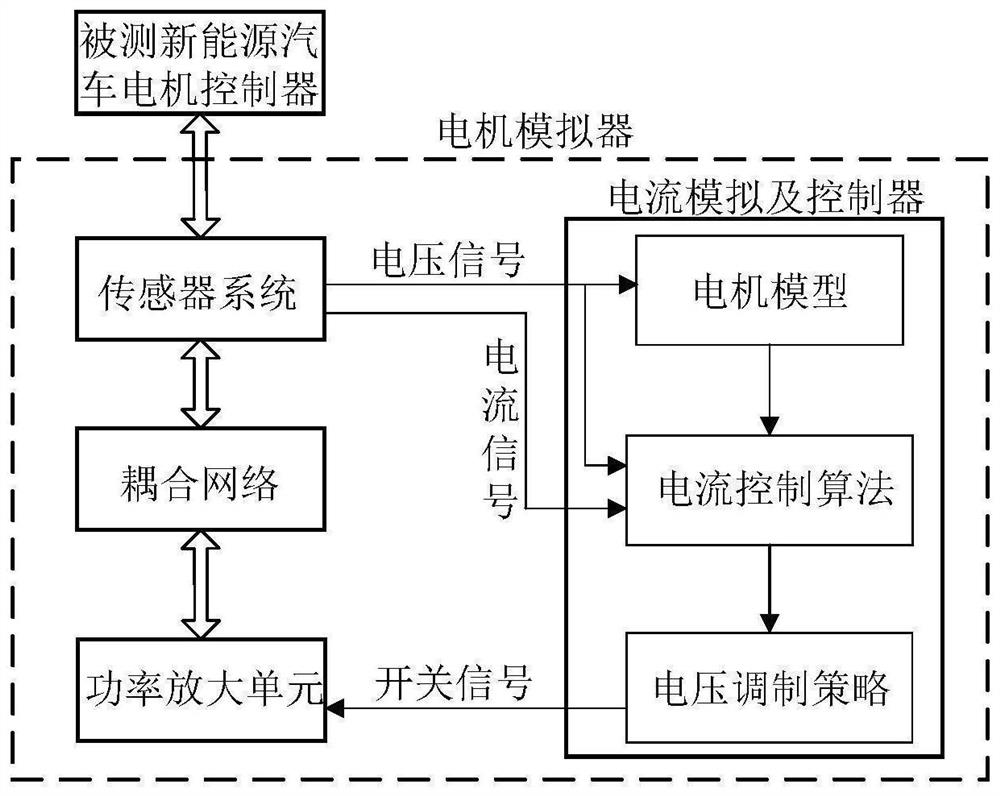
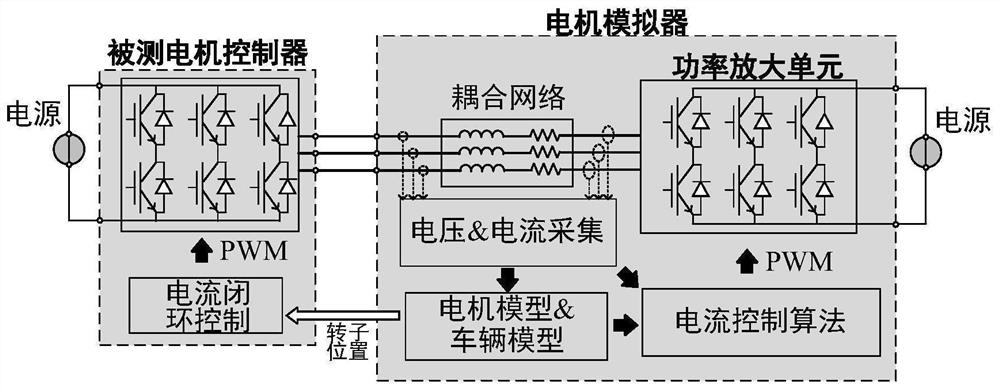
[0034] figure 1 It is a schematic diagram of the functional structure of the motor simulator in the present invention. The motor simulator includes a sensor system, a coupling unit, a power amplification unit, a current simulation and a controller, and the current simulation and the controller run in a high-speed FPGA processor, which includes a motor model, The current control algorithm and voltage modulation strategy are three parts. The sensor system performs high-speed real-time acquisition of the phase voltage and current output by the motor controller under test. The current simulation and the controller are based on the high-speed real-time calculation of the internal motor model and circuit control algorithm. The high...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More