

AUV shape optimization method based on improved graffiti algorithm
An optimization method and shape technology, applied in the direction of calculation, calculation model, geometric CAD, etc., can solve the problems of long design cycle and time-consuming, and achieve the effect of retaining ability, increasing diversity, and strengthening the ability of local search
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
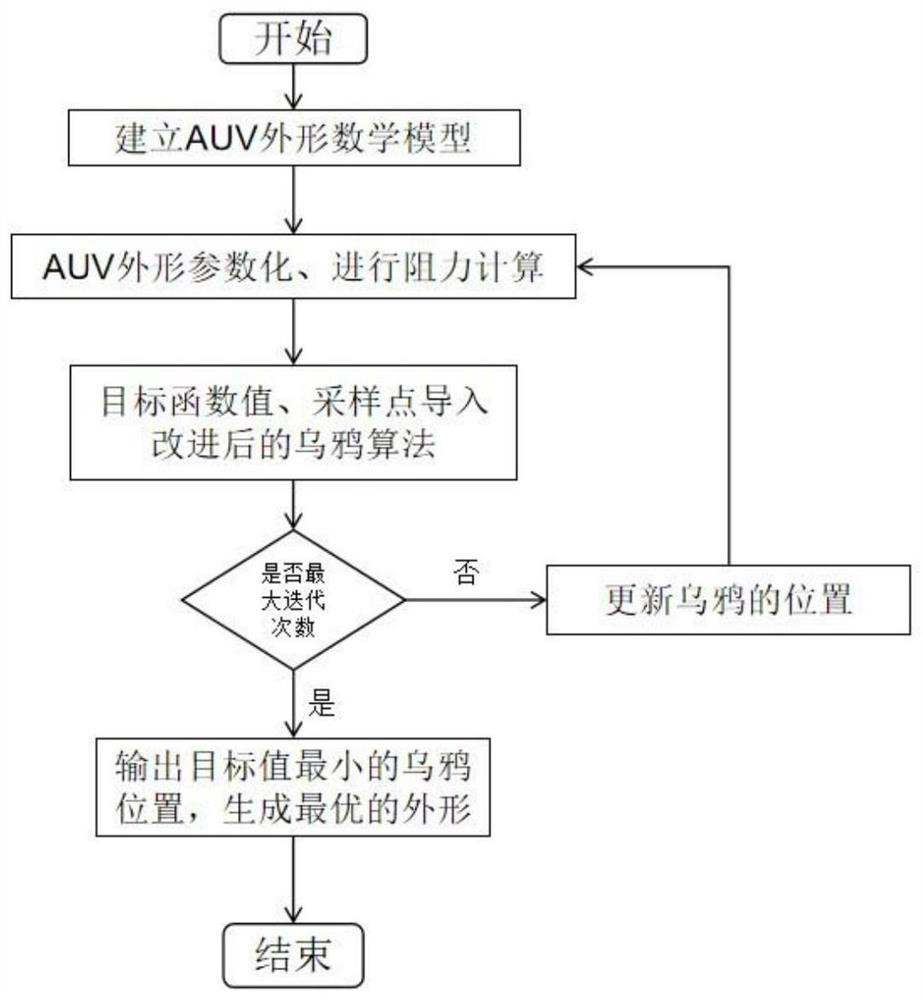
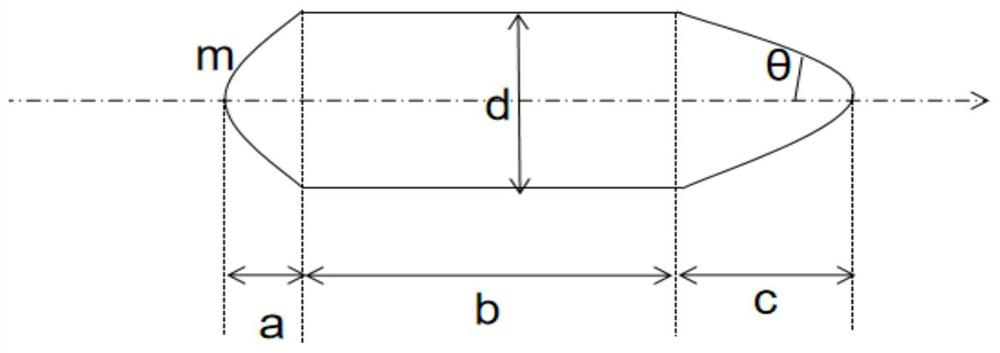
[0082] Step 1, as attached figure 1 As shown, refer to the common AUV shape, adopt the Myring shape design with small resistance and low energy consumption, and establish the mathematical model of AUV shape design as follows:
[0083] The bow curve equation of the Myring shape is as follows:
[0084]
[0085] The equation of the middle curve of the Myring shape is as follows:
[0086]
[0087] The stern curve equation of the Myring shape is as follows:
[0088]
[0089] In the above three curve equations, a is the length of the bow, b is the length of the middle, c is the length of the stern, d is the diameter of the middle, and the unit is millimeter (mm) for a more precise shape. θ is the stern wrap angle in degrees (O), and m is the Myring coefficient.
[0090] Design space exploration, there is no fixed value space for the 6 parameters of the model, the design space is initially determined as a: [100,800], b: [500,2000], c: [200,1000], The value of d is genera...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More