

Spatial motion planning method of multi-degree-of-freedom robot
A space movement and robot technology, applied in the field of intelligent robots, can solve problems such as over-planning, over-planning of collision detection, waste of computing power resources, etc., to achieve the effect of avoiding over-planning and meeting real-time requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0026] Example 1: Motion planning of a six-axis robot
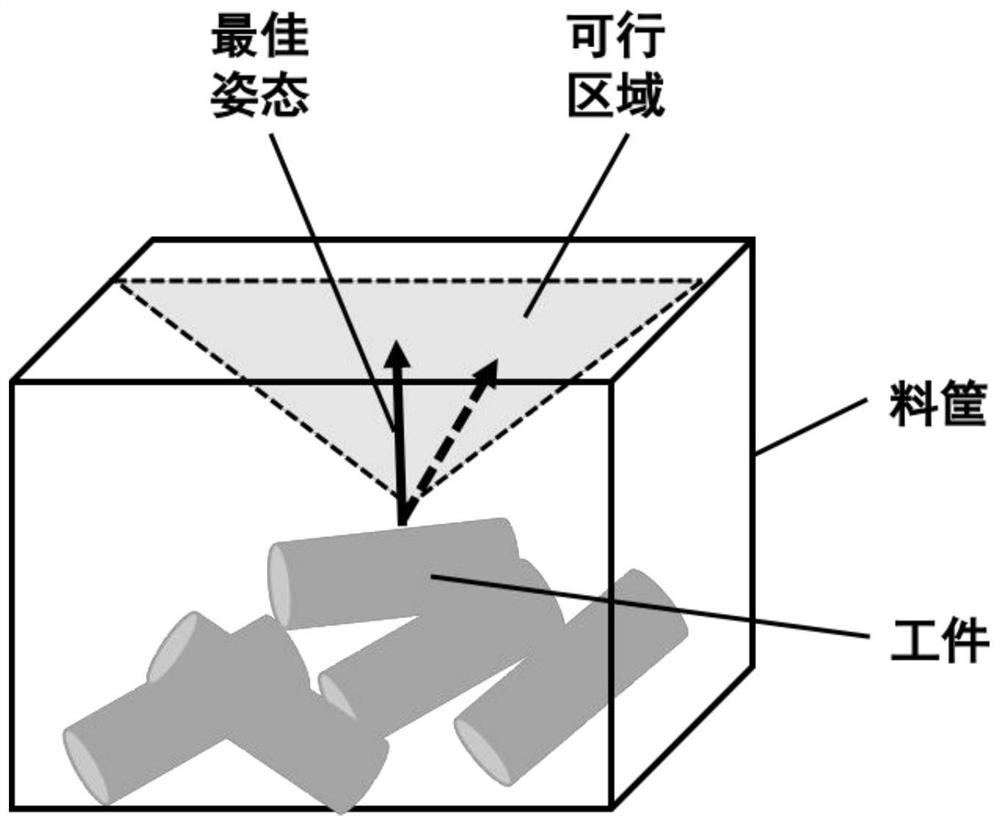
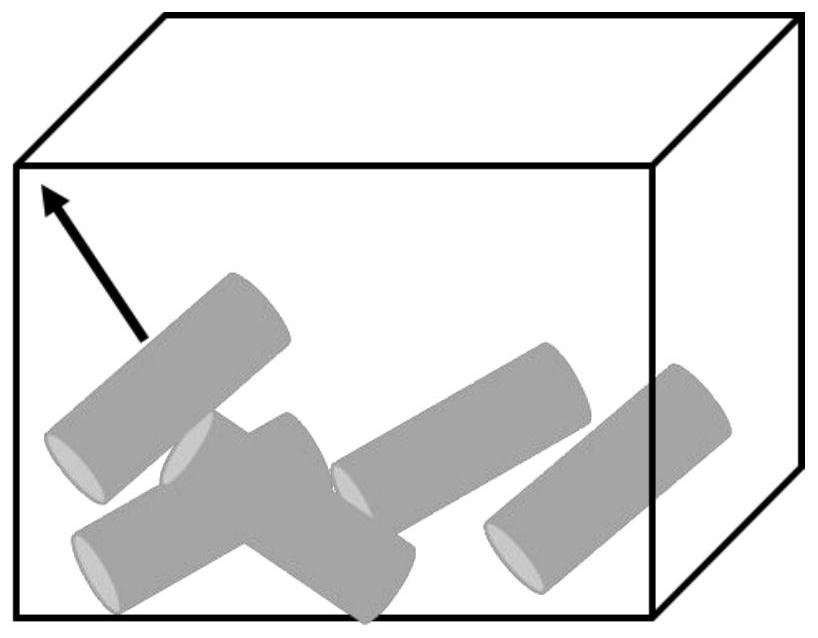
[0027] Compared with robots with less degrees of freedom, generally speaking, six-axis robots or redundant robots can complete tasks in full posture. However, when there are interferences such as obstacles in the environment, it will have an impact on the operation of the robot, especially in the case of bulk grabbing in industrial production, the interference caused by obstacles in the surrounding environment of task targets such as baskets and other workpieces The impact is far more than that of other obstacles in the path environment, and in general, under the requirements of 5S and other requirements in industrial occasions, unnecessary obstacles need to be removed, and unnecessary obstacles will not be added artificially. Therefore, this embodiment is described with this scenario, such as figure 1 Shown:
[0028] Step 1: Initialize the robot environment, obtain the initial state of the robot, and obtain the spatial...
Embodiment 2
[0037] Embodiment 2: Motion planning of five-axis robots and other robots with less degrees of freedom
[0038] Due to the lack of one or more degrees of freedom, the robot's workspace is incomplete. At this time, the robot often cannot operate according to the optimal posture of the workpiece. Therefore, from the perspective of completing the entire work task, the feasible posture becomes the "best posture" under the entire work task.
[0039] Step 1: Initialize the robot environment, obtain the initial state of the robot, and obtain the spatial information of the robot, surrounding environment obstacles and task targets through a positioning system (such as: 3D camera, laser radar, etc.);
[0040] Wherein, initializing the robot, obtaining the initial state of the robot includes at least one of the following information: initial position posture and / or joint angle information of the robot;
[0041] Step 2: Determine the feasible area, and calculate the optimal attitude info...
Embodiment 3
[0050] Embodiment 3: Motion planning for other obstacles in the path process environment
[0051] The above two embodiments are all carried out in a working environment where there are no unnecessary obstacles in the process of the robot approaching the task target in a normal industrial setting. When there are interfering obstacles in the robot's motion process environment, further motion planning judgment measures are required in the process of performing step three.
[0052] The specific description is as follows: When there are other obstacles in the path of the robot reaching the surrounding environment of the mission target, firstly, the motion angles of other joints are reversely solved according to the feasible posture and the position of the mission target, and then the spatial information of each joint is calculated through the kinematics forward solution and Consolidate the spatial information of the connecting rod and the peripheral equipment of the robot, and judg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More