

RTK and PPK system positioning correction compensation method and device for unmanned aerial vehicle
A compensation method and UAV technology, applied in the field of positioning, can solve problems such as complex calculation process, complicated electronic equipment, and increased UAV load, and achieve the effect of simplifying the system composition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
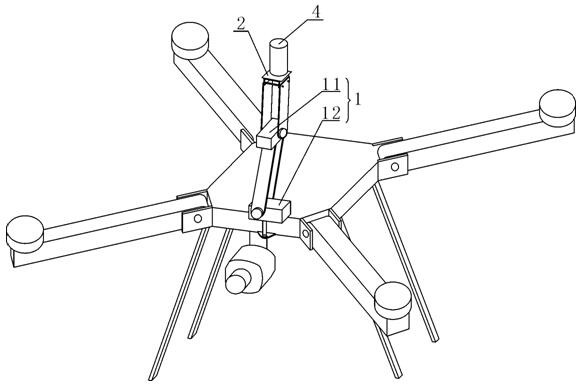
[0037] Such as figure 1 As shown, a UAV RTK and PPK system positioning correction compensation device includes an antenna installation platform 2 for installing an RTK / PPK antenna 4, and also includes a compensation servo system 1 connected to the UAV flight control system, The compensation servo system 1 includes a pitch axis servo motor 11 and a roll axis servo motor 12 for correcting and compensating the pitch angle and roll angle of the UAV during the aerial photography process, and the antenna installation platform 2 is installed on the compensation Servo 1 on.
[0038] Implementation process
[0039] The RTK / PPK antenna 4 is installed on the antenna installation platform 2 of the compensation servo system 1, and the phase center of the RTK / PPK antenna 4 is set directly above the optical center of the aerial camera lens.
[0040] During the flight aerial photography process, the compensation servo system 1 collects the PWM signals used for the stabilization control of t...
Embodiment 2
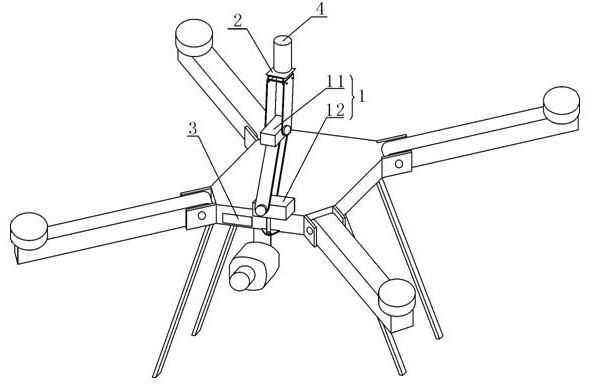
[0043] Such as figure 2 , 3 As shown, a UAV RTK and PPK system positioning correction compensation device includes an antenna installation platform 2 for installing an RTK / PPK antenna 4, and also includes a compensation servo system 1 connected to the UAV flight control system, The compensation servo system 1 includes a pitch axis servo motor 11 and a roll axis servo motor 12 for correcting and compensating the pitch angle and roll angle of the UAV during the aerial photography process, and the antenna installation platform 2 is installed on the compensation Servo 1 on.
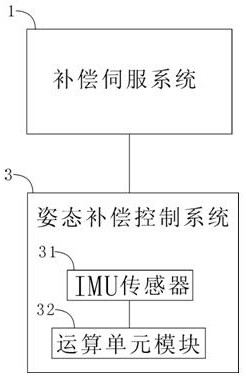
[0044] The compensation servo system 1 is also connected with an attitude compensation control system 3, and the attitude compensation control system 3 is used to collect the pitch angle and roll angle attitude information of the UAV in real time, and send the pitch angle and roll angle compensation commands to To Compensation Servo 1.
[0045] Such as image 3 As shown, the attitude compensation control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More