

Active control method for grinding and polishing machining contact force of robot
A technology of active control and robotics, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of dependence on response speed and difficult control, so as to improve force tracking effect, processing accuracy and tracking effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
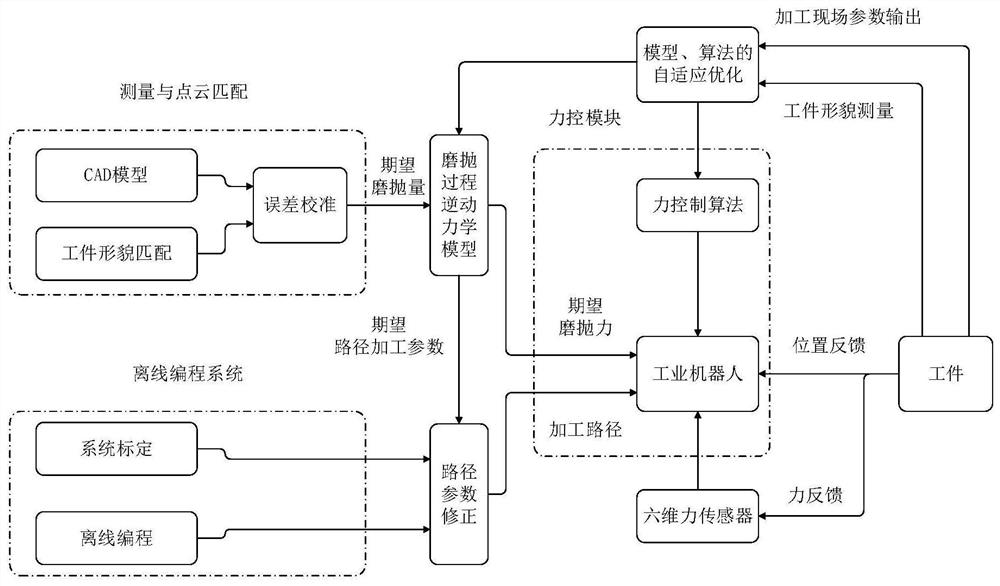
[0095] An active control method for contact force of robot grinding and polishing in an embodiment of the present invention is used to improve the tracking effect of impedance control on the expected force, improve the processing effect of the grinding and polishing system and the surface quality of the workpiece, and specifically includes the following steps:
[0096] (1) Perform off-line programming and simulation of the blade model in RobotStudio software, and complete the calibration of sensors such as robots, workpiece coordinate systems, scanners, and six-dimensional force sensors on site;
[0097] (2) Use the robot motion under non-impedance control to obtain the coordinate value of the robot in the z direction of the tool coordinate system, and perform polynomial fitting on the obtained position points to determine the key parameters in the objective function, thereby determining the primary constraints Objective function:
[0098]
[0099] In the formula, N is the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More