

Binocular camera system and binocular camera space calibration method
A binocular camera and camera technology, applied in computer parts, character and pattern recognition, image data processing and other directions, can solve the problems of loss of spatial depth information, reduce imaging quality, etc., and achieve the effect of improving imaging quality and improving accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0029] Due to the limitation of the imaging principle of the existing common CMOS camera, common CMOS cameras have smear phenomenon when shooting high-speed moving targets, which will cause blurred images, and it is difficult to effectively use the image data captured by them. The event camera is a camera with a different imaging principle from the ordinary CMOS camera. The event camera simulates the imaging characteristics of the biological retina. It only images moving targets, so the data volume of the event camera is smaller, and it can shoot high-speed moving targets. Combining a CMOS camera and an event camera to form a binocular camera system can effectively use the advantages of the two cameras to obtain data with the advantages of high frame rate, high dynamic range, and high spatial resolution.
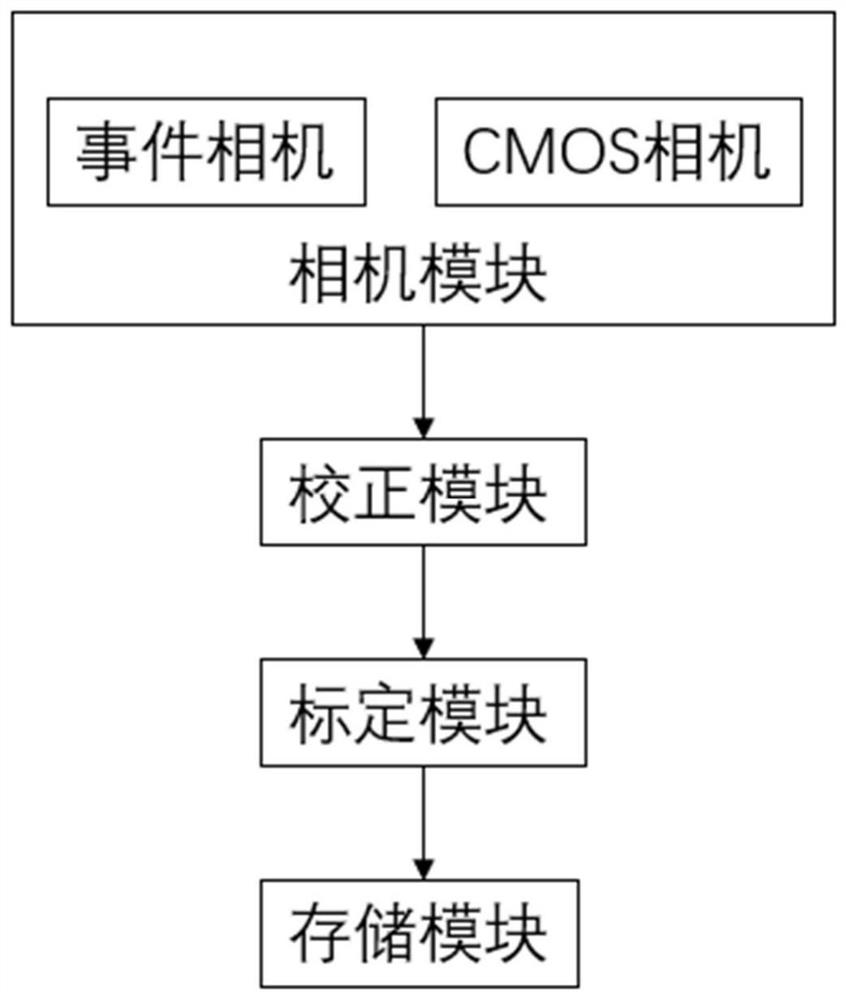
[0030] The present invention is a binocular camera system, see figure 1 , the binocular camera system of the present invention is sequentially cascaded with a camera module,...
Embodiment 2
[0041] The overall composition of a binocular camera system is the same as in Embodiment 1. The camera matrix and distortion matrix of the pre-calibrated event camera stored in the correction module of the present invention are obtained by Zhang Zhengyou's calibration method, and the camera of the pre-calibrated CMOS camera stored in the correction module The matrix and distortion matrix are obtained by Zhang Zhengyou’s calibration method; the rotation matrix and translation matrix between the pre-calibrated event camera and the CMOS camera stored in the correction module are obtained by Bouguet’s epipolar correction method. In this embodiment, when calibrating the event camera and the common CMOS camera, the calibration board used is a checkerboard calibration board. When calibrating the event camera in this camera, a full-scale grayscale image is acquired through the Celex-V camera.
[0042] The invention performs distortion correction on each camera in the binocular camera ...
Embodiment 3
[0044] Due to the parallax between the two cameras in the binocular camera system in the present invention, the coordinates of the same target on the image planes of the two cameras are related to the relative positions of the target and the binocular camera system. When the relative position of the binocular camera system changes, the coordinates of the target on the respective image planes of the two cameras in the binocular camera system will also change. The camera system is calibrated in real time. The spatial calibration method of the present invention utilizes the binocular camera system of the present invention to capture data in real time, and then corrects and calibrates these data in real time.
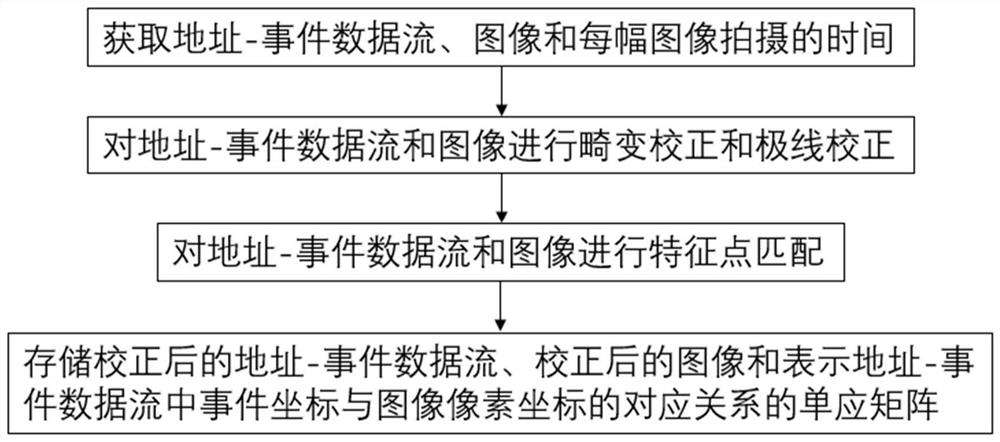
[0045] The present invention is also a binocular camera space calibration method, which is implemented on the above binocular camera system, see figure 2 , including the following steps:
[0046] (1) The camera module obtains the address-event data stream, images and the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More