

Unmanned ship-oriented unmanned aerial vehicle autonomous landing control method
A control method, UAV technology, applied in non-electric variable control, altitude or depth control, control/regulation system, etc. Improve target recognition and tracking efficiency, strong anti-electromagnetic interference ability, and low latency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
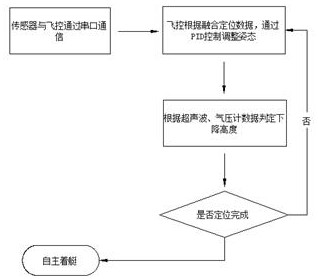
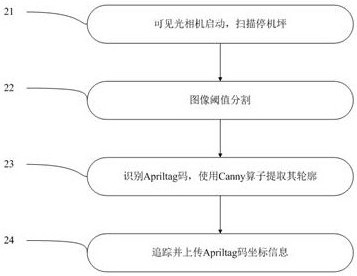
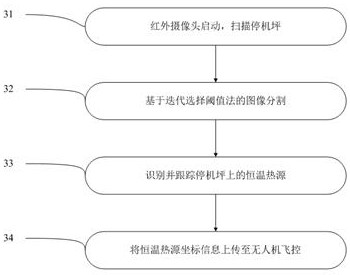
[0061] see Figure 1-9 , the present invention provides a technical solution: a UAV autonomous landing control method for unmanned boats, including UAV 51, UAV second positioning 52, UAV first positioning 53, UWB positioning Antenna 61, apron 62, Apriltag code 63, constant temperature heat source 64, airborne UWB label 71 and airborne camera 72, apron 62 is installed in the unmanned boat 51, and UWB positioning antenna 61 is installed around the apron 62, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More