

Unmanned aerial vehicle bridge floor coverage motion planning method
A motion planning, bridge deck technology, applied in non-electric variable control, instruments, control/regulation systems, etc., can solve the problems of long-time sampling, large amount of calculation, and considering the flight stability of UAVs, etc. Achieve the effect of ensuring coverage resolution, improving flight stability, and easy trajectory execution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0092] Specific implementation mode one: combine figure 1 , figure 2 and image 3 Describe this embodiment, a kind of unmanned aerial vehicle deck coverage motion planning method described in this embodiment is realized according to the following steps:
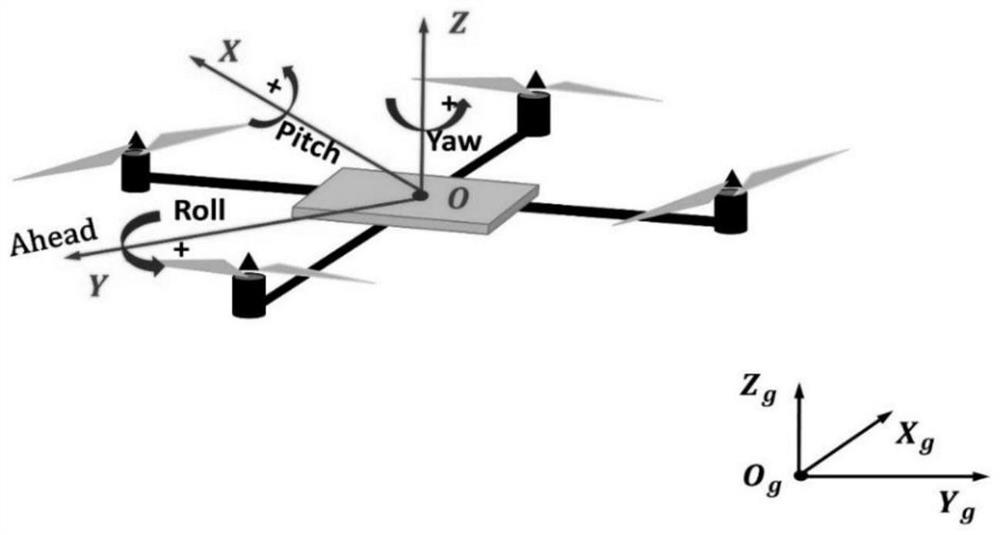
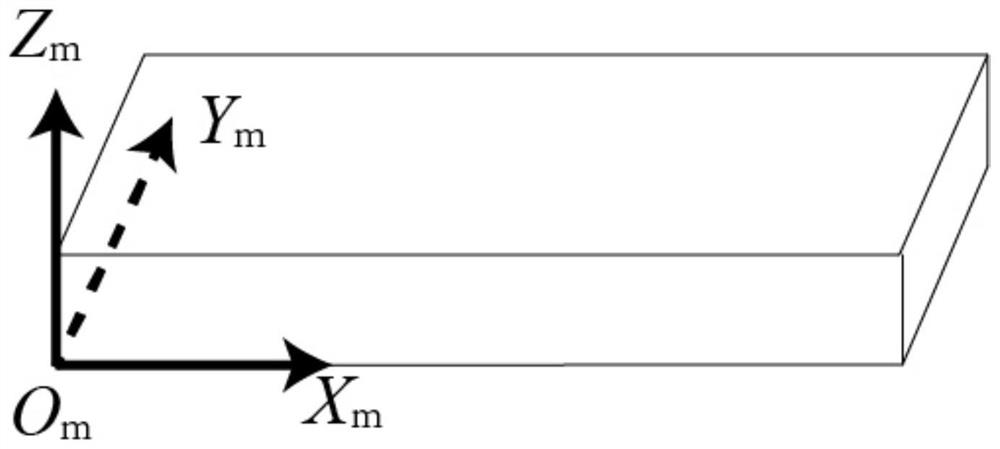
[0093] Step 1: Establish a geographic coordinate system, a body coordinate system, and a bridge deck coordinate system, and determine a sensor measurement model.
[0094] Establish the body coordinate system, the origin O of the body coordinate system OXYZ is taken as the center of mass of the quadrotor, the centerline of the two motors in the direction of the quadrotor head is taken as the longitudinal axis OY of the body, and the centerline of the two motors on the right side of the quadrotor is taken as the OX axis, OZ Satisfy the right-hand rule, that is, it is perpendicular to the plane of the body, and upward is the positive direction. Establish geographic coordinate system, geographic coordinate system O g x g Y ...
specific Embodiment approach 2
[0105] Specific embodiment two: the difference between this embodiment and specific embodiment one is: decomposing the bridge deck topology described in step two and adopting a bow-shaped covering path for each covering unit. The specific process is as follows:
[0106] Considering a rectangular bridge deck, the middle part becomes an obstacle on the 2D plane due to the connection of piers, such as Figure 4 shown. Let the length of the bridge deck be l b , then the straight line cluster {x m =x mi |x mi ∈[0,l b ]} Slice scan the bridge deck. When the number of segments of the straight line changes, record the point of the corresponding obstacle space and use it as the vertex. Such as Figure 4 As shown, at the vertex V 1 ,V 2When between, the segment number of the straight line inside the bridge deck is 1; at the vertex V 2 ,V 3 When between, the number of straight line segments inside the bridge deck is 2; at the vertex V 3 ,V 4 When between, the number of strai...
specific Embodiment approach 3
[0115] Specific implementation mode three: the difference between this implementation mode and specific implementation modes one to two is: the specific process of determining the unit coverage sequence described in step three is:
[0116] Let the vertex set of the bridge deck V={v 1 ,v 2 ,…}, the set of edges of the bridge deck E={E 1 ,E 2 ,...}. The connectivity matrix defining the edges and vertices of the bridge deck is A ne , A ne element a in ne Represents the connectivity of edges and vertices in an undirected graph, when a ne = 1, it means that the edge e∈E connects the vertex n∈V. On this basis, the following linear optimization problems can be constructed:
[0117]
[0118] The following conditions
[0119]
[0120]
[0121]
[0122] Among them, when the vertex n initially has an odd number of connections, b n =1, otherwise when there are even number of connections b n =0. w n is an integer variable, and b n Adjusting the equality constraint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More