

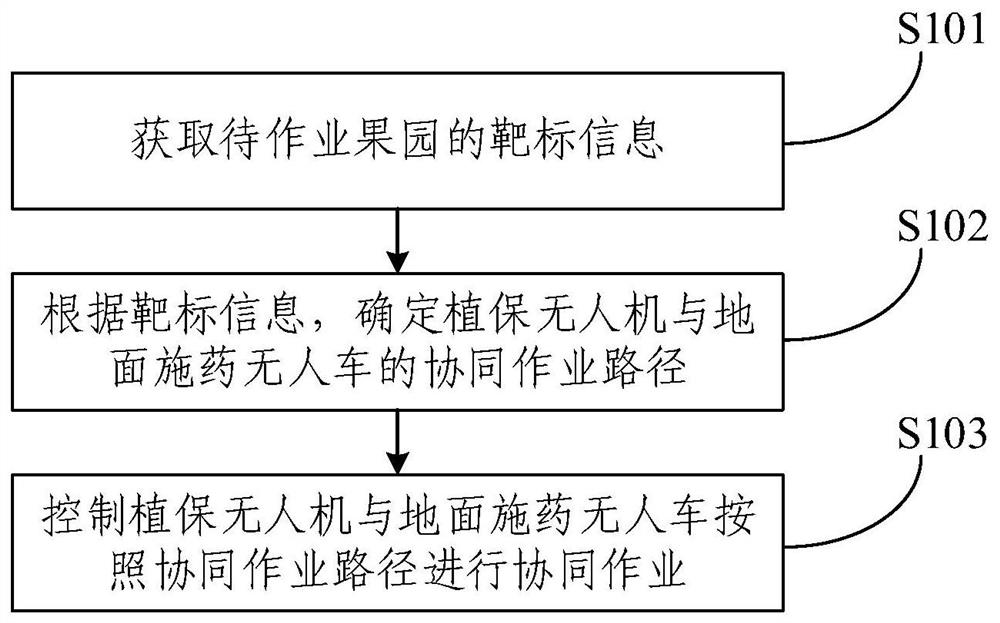
Air-ground cooperative pesticide application method and system
An air-ground collaborative and ground-based technology, applied in control/regulation systems, instruments, three-dimensional position/channel control, etc., can solve the problems of incomplete coverage of chemical liquid, poor control effect, uneven spraying, etc., and achieve optimal spraying control methods and effect, effective control, and effect of reducing negative impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the purpose, technical solutions and advantages of the present invention clearer, the technical solutions in the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the present invention. Obviously, the described embodiments are part of the embodiments of the present invention , but not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0035] It should be noted that, in the description of the embodiments of the present invention, the terms "comprising", "comprising" or any other variant thereof are intended to cover a non-exclusive inclusion, so that a process, method, article or device comprising a series of elements Not only those elements are included, but also other elements not expressly listed or inherent in such proc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More