

A heterogeneous multi-vehicle cooperative control method based on multi-source information topology communication system
A communication system and multi-source information technology, applied in the field of heterogeneous multi-vehicle cooperative control, can solve the problems of increasing system calculation time, not considering information interaction technology, lack of effective analysis of multi-vehicle heterogeneous characteristics, etc., to ensure stability, The effect of ensuring safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] In order to make the purpose, technical solutions and advantages of the present invention clearer, the following technical solutions in the present invention are clearly and completely described. Obviously, the described embodiments are some embodiments of the present invention, rather than all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
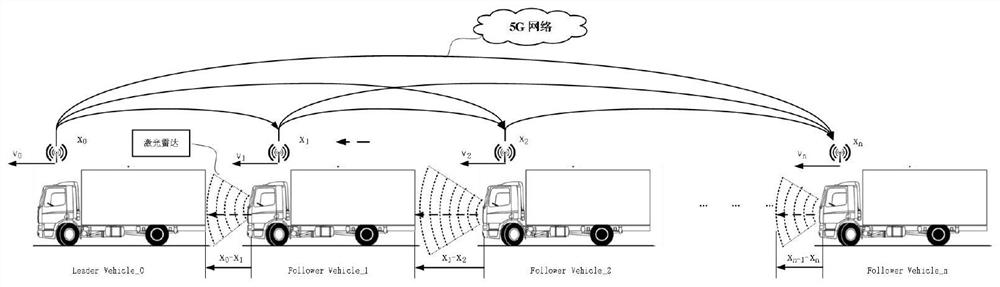
[0083] A heterogeneous multi-vehicle cooperative control method and system for multi-source forward information topology communication, figure 1 It is a schematic diagram of vehicle platooning, which shows that the vehicle queuing is formed by n vehicles, including two modes of vehicle platooning, which are divided into 5g communication interconnection of multi-source forward information topology communication structure and adaptive cruise based on laser rada...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More