

Soft driver
A software driver and driver technology, applied in the direction of manufacturing tools, chucks, manipulators, etc., can solve problems such as incapability of grasping, limited response frequency, poor structural rigidity, etc., and achieve good human-computer interaction performance, high grasping/release and buckling /Effects of stretching frequency, strong grasping power and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the features and advantages of the present invention more comprehensible, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
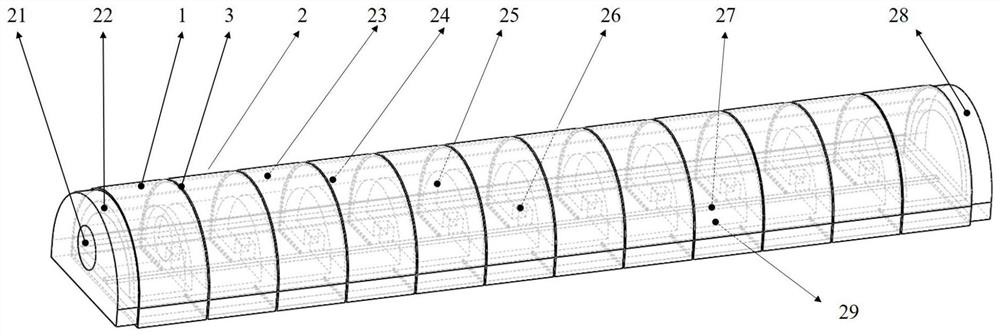
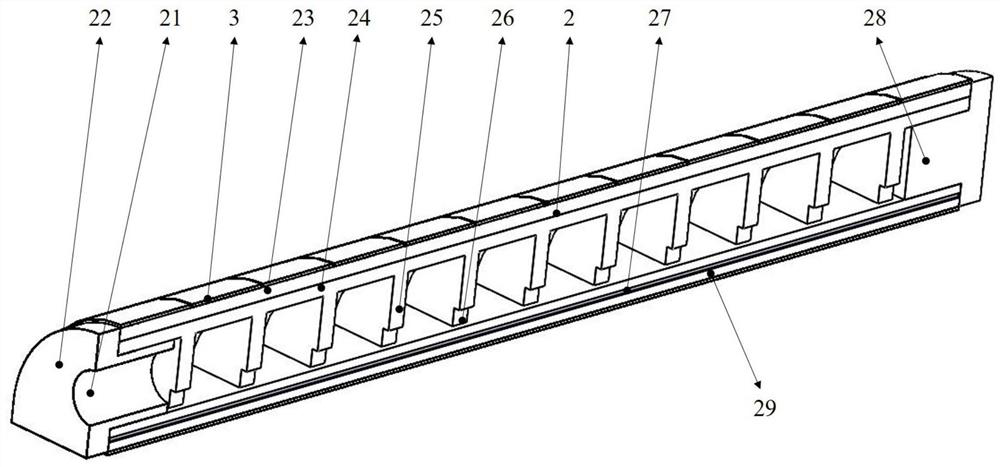
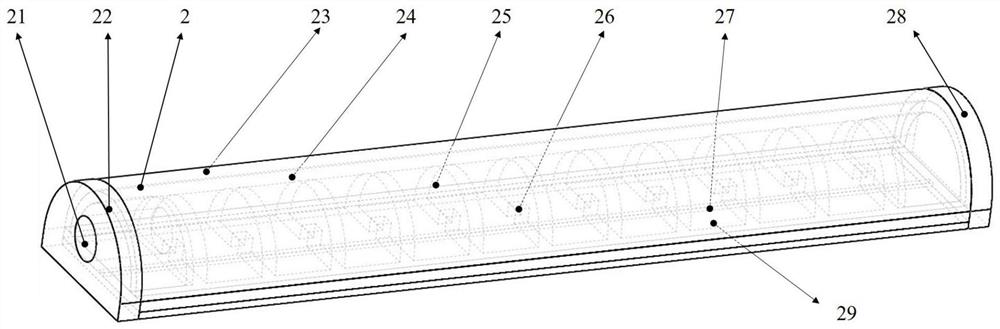
[0027] see Figure 1 ~ Figure 4 , a soft actuator 1 according to the embodiment of the present invention, the soft actuator 1 can be driven pneumatically or hydraulically, and can generate a higher output force than other soft actuators to assist grasping or limb training of patients. The software driver 1 of this embodiment includes a software driver body 2 and a binding layer 3 covering the periphery of the software driver body 2 . The software driver body 2 includes a plurality of elastic layers (23 and 24) stacked successively from the inside to the outside, and a front end cover 22 and a rear end cover 28 blocked at both ends of the plurality of elastic layers; the outermost elastic layer has the largest hardness, and the rest The hardness of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More