Control system and control method for humanoid mushroom picking double-arm robot
A control system and robot technology, applied in control/regulation systems, mushroom cultivation, non-electric variable control, etc., can solve problems such as low work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
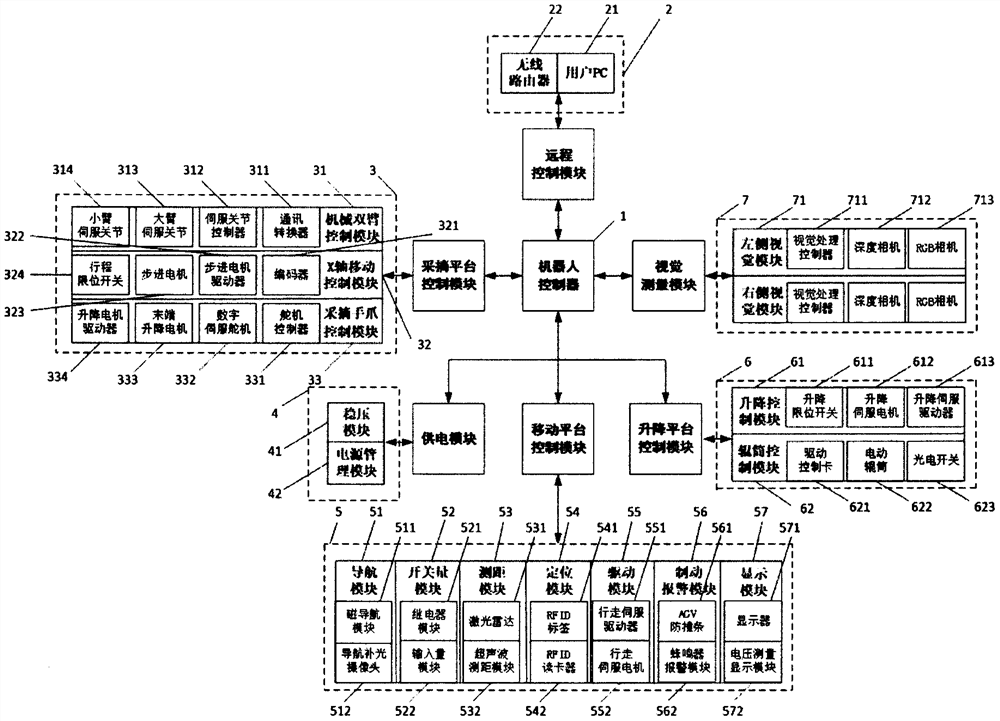
[0037] combine figure 1 This embodiment is described. This embodiment provides a humanoid mushroom picking dual-arm robot control system, including a robot controller 1 and a remote control module 2 connected to the robot controller 1, a picking platform control module 3, Power supply module 4, mobile platform control module 5, lifting platform control module 6 and visual measurement module 7; remote control module 2 includes user PC 21 and wireless router 22; picking platform control module 3 includes mechanical double-arm control module 31, X-axis movement Control module 32 and picking claw control module 33; Power supply module 4 includes voltage stabilizing module 41 and power management module 42; Mobile platform control module 5 includes navigation module 51, switching value module 52, ranging module 53, positioning module 54, drive Module 55, brake alarm module 56 and display module 57; Lifting platform control module 6 includes lifting control module 61, roller control...
Embodiment 2
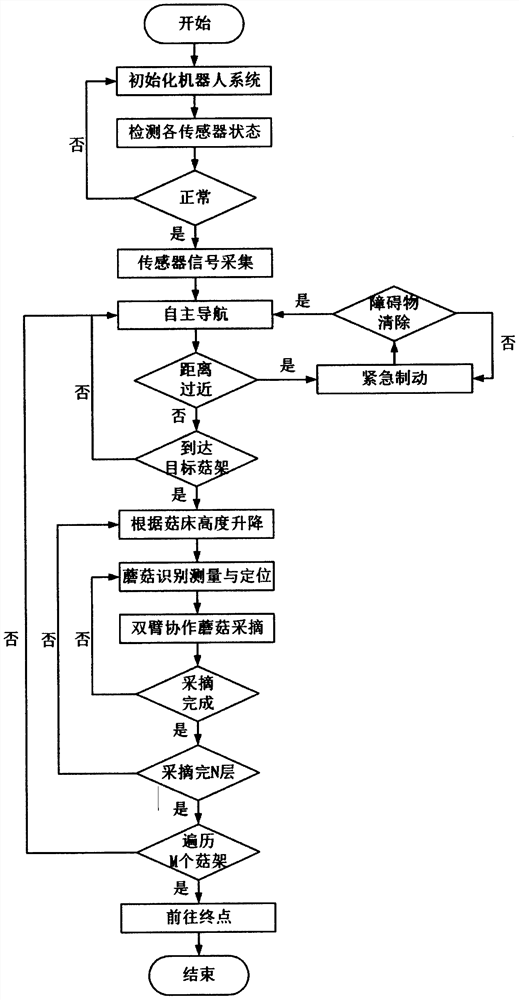
[0058] combine Figure 2 to Figure 6 To describe this embodiment, figure 2 A control method for a humanoid mushroom-picking dual-arm robot is given, including the following steps:
[0059] Step 1, firstly initialize the robot system, supply power to the motor and the sensor, and start collecting the signal of the sensor after ensuring that the state of each sensor is normal, and then under the guidance of the navigation module 51, the mobile platform control module 5 controls the mobile platform of the robot to reach the first A docking point for a mushroom stand;
[0060] Step 2: The mushroom rack has N layers, and the lifting platform control module 6 controls the lifting platform to lift according to the height of the mushroom rack. After the lifting platform reaches the height of the mushroom bed on the first layer, the visual measurement module 7 is used to scan the plane of the mushroom bed to perform Mushroom identification measurement and positioning;
[0061] Step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com