

Space registration and real-time navigation method for minimally invasive mammary gland interventional surgical robot
A surgical robot and minimally invasive interventional technology, applied in the field of medical robotics, can solve problems such as the inability to guarantee the positioning accuracy of puncture points and tumor puncture accuracy, reduce work efficiency, increase patient pain, etc., and achieve the effect of visualization and positioning tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
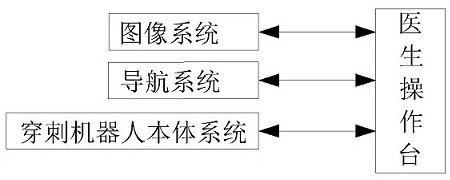
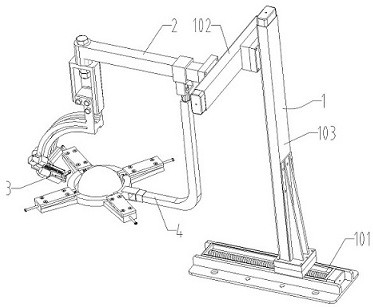
[0058] like Figure 1-6 As shown, a breast minimally invasive interventional surgery robot includes a puncture robot body system, a navigation system, an image system and a doctor's console, and the puncture robot body system, navigation system and image system are all connected to the doctor's console with signals, and the puncture robot The main body system includes a three-dimensional linear module 1. The slider of the Y-axis linear module 102 of the three-dimensional linear module 1 is fixedly connected with a passive joint mechanical arm 2. The puncture device 3 , a mammary gland fixation device 4 is arranged between the three-dimensional linear module 1 and the active puncture device 3 .
[0059] The three-dimensional linear module 1 includes an X-axis linear module 101, a Y-axis linear module 102, and a Z-axis linear module 103. The stroke of the X-axis linear module 101 must be ≥ 400 mm, and the stroke of the Y-axis linear module 102 must be ≥ 200 mm. , Z-axis linear ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More