

Road surface unevenness identification method based on Kalman filtering theory
A Kalman filter, uneven road technology, applied in the direction of the control device, etc., can solve the problems of limited application of the profiler, long calculation time, high price, etc., and achieve the effect of small real-time calculation amount, strong operability, and low hardware cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
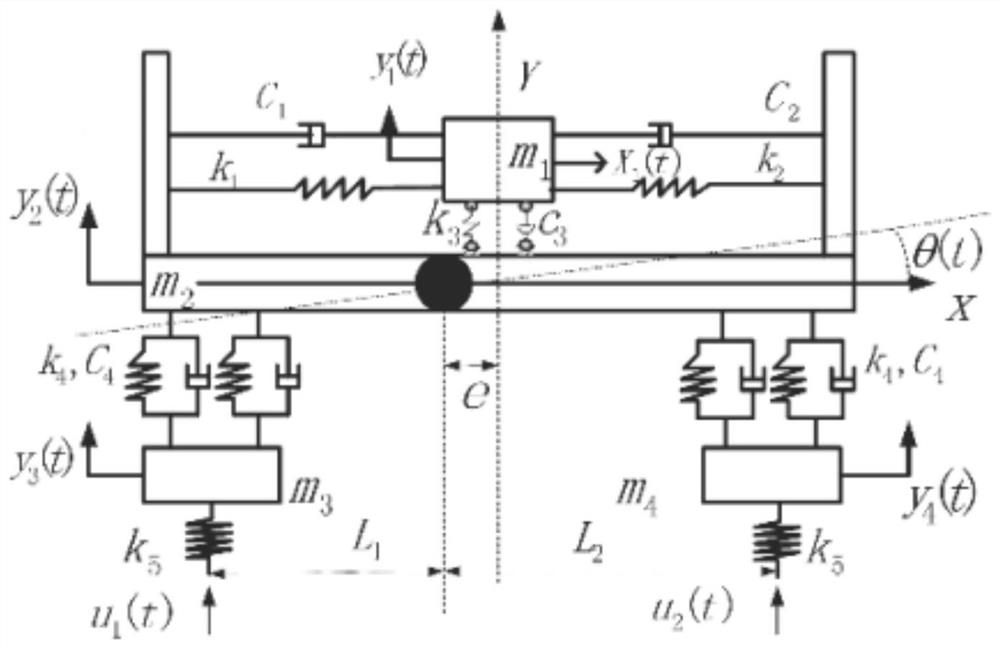
[0128] refer to figure 1 As shown, in this example, the vehicle will be placed on the longitudinal symmetrical center line of the vehicle. Since the vibration of the vehicle is generally small, the model can be simplified to a two-dimensional plane model, as shown in figure 1 shown. There are 6 degrees of freedom in the model, representing the suspension, body and equipment motion respectively. The coordinate system is established on the moving vehicle, which involves the tire stiffness kt, which is related to the road surface displacement u(t), and it is assumed that the damping of the tire is negligible.
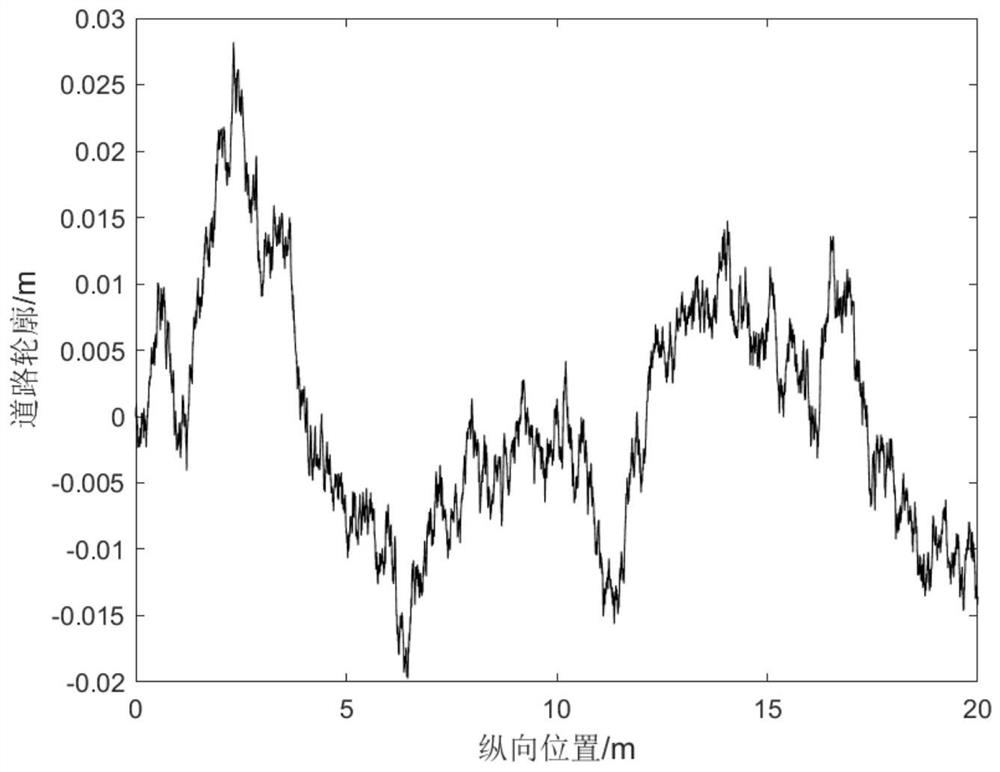
[0129] The following is a specific embodiment using the method proposed above, wherein the data used are generated by simulation. Considering that the road roughness is a smooth, Gaussian random process with zero mean and an ergodic random process, the random input can reflect the actual road conditions of the vehicle. Therefore, white noise filtering is used to generat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More