

Motion planning method for pushing mechanism of hydraulic support and scraper conveyor
A technology of scraper conveyor and hydraulic support, which is applied in the fields of mine roof support, earthwork drilling, and special data processing applications, etc. It can solve problems such as redundant calculations, obstacles to the coordinated advancement of virtual fully mechanized mining faces, and difficulties, so as to avoid calculations. process, realize real-time and motion visualization, and the effect of reasonable motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described in detail with reference to the accompanying drawings.
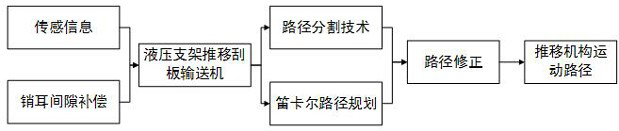
[0047] Such as figure 1 As shown, the present invention provides a method for motion planning of the pushing mechanism of the hydraulic support and the scraper conveyor, including:
[0048] When the pushing mechanism of the hydraulic support and the scraper conveyor starts to move, the lug clearance compensation method between the hydraulic support and the scraper conveyor is used to eliminate the lug gap between the hydraulic support and the scraper conveyor, and the real-time sensing information of the embedded sensor on the hydraulic support is obtained;
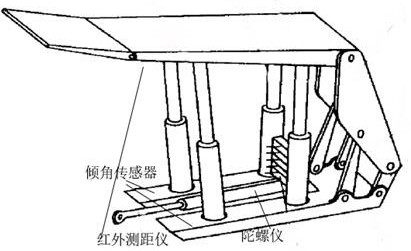
[0049] Wherein, the embedded sensor includes at least an infrared range finder installed on the base of the hydraulic support, an inclination sensor embedded on bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More