Navigation center line extraction method for vegetable greenhouse inspection robot
An inspection robot and navigation center technology, applied in instruments, image data processing, computing and other directions, can solve the problems of blurred images of navigation lines, sensitive to light changes, slow recognition speed, etc., to improve robustness, sensitive and accurate navigation, The effect of reducing labor intensity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0080] The technical solutions of the present invention will be further specifically described below through the embodiments and in conjunction with the accompanying drawings. In the specification, the same or similar reference numerals designate the same or similar components. The following description of the embodiments of the present invention with reference to the accompanying drawings is intended to explain the general inventive concept of the present invention, but should not be construed as a limitation of the present invention.
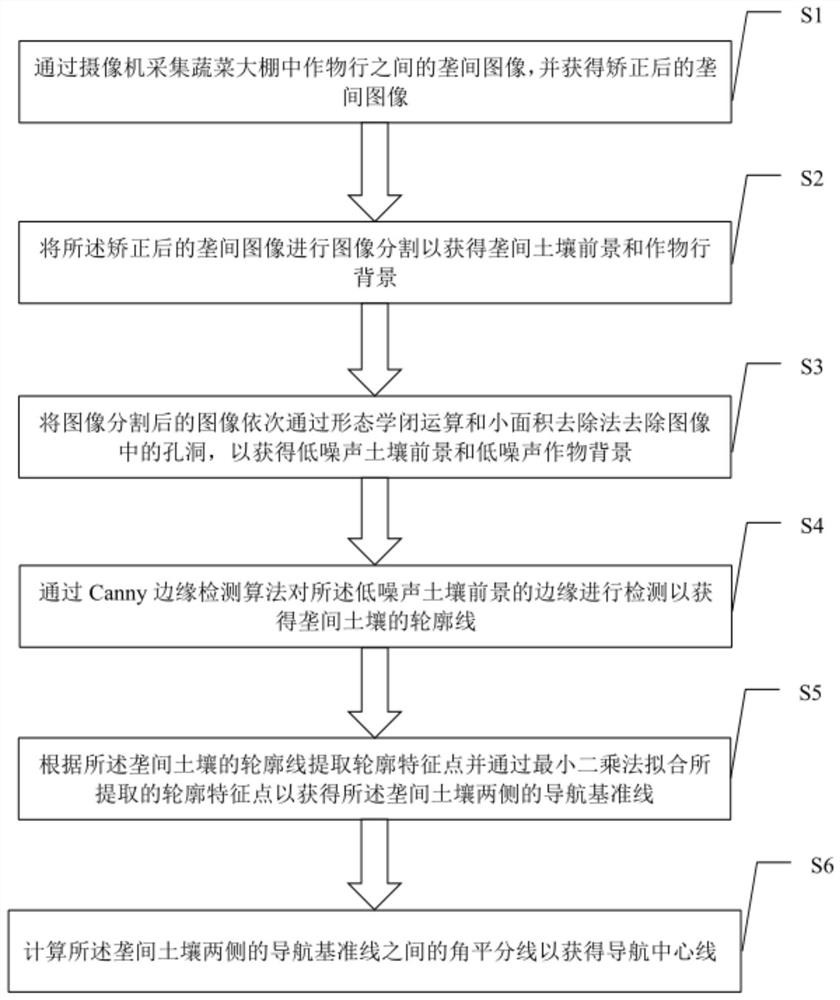
[0081] see figure 1 , which shows the flow of a method for extracting a navigation centerline for a vegetable greenhouse inspection robot according to an embodiment of the present invention. The method for extracting the navigation centerline comprises the following steps:
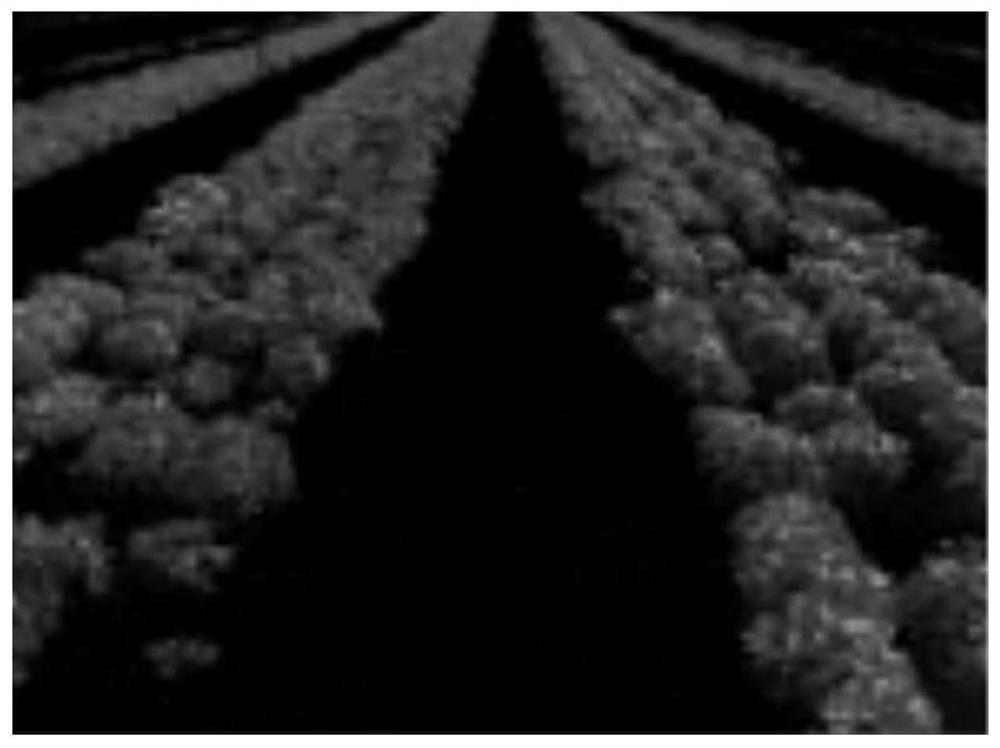
[0082] Step S1 collects the inter-ridge images between the crop rows in the vegetable greenhouse through the camera, and obtains the corrected inter-ridge images;
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More