Improved PID controller parameter setting method of model-free system
A parameter setting and controller technology, which is applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as inaccurate mathematical models, and achieve the effect of fast and convenient response.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
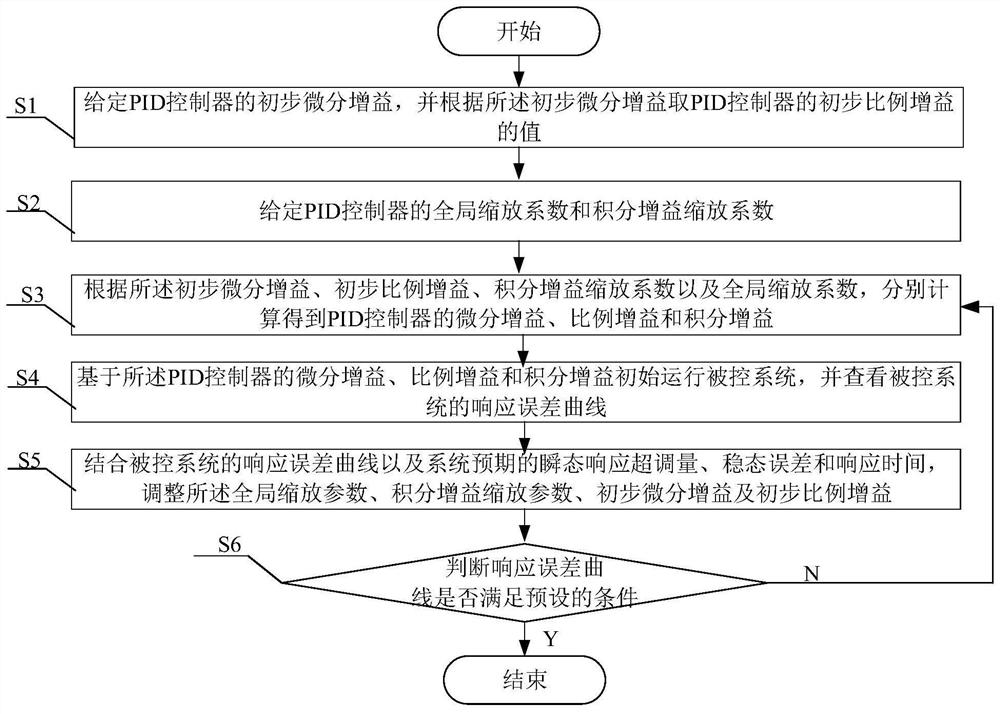
[0034] Taking the controlled object as a second-order system and being disturbed as an example, the controlled object can be described by the following mathematical model:
[0035]
[0036] Among them, f 0 is a known modeling part of the system, when using a PID controller, its control law model is as follows:
[0037]
[0038] Among them, the parameter K p ,K i ,K d The relationship is the key to design the PID control law. Therefore, there are two problems when using a PID controller. 1) It is not easy to achieve system stability by tuning parameters; 2) To obtain the desired transient control performance and steady-state error requires a lot of time for parameter trial and error. In view of the above problems, the present invention proposes a fast PID parameter tuning method whose control object is a second-order system, which is not only suitable for PID controller parameter tuning of known / unknown linear systems, but also suitable for PID controller parameters o...
example 1
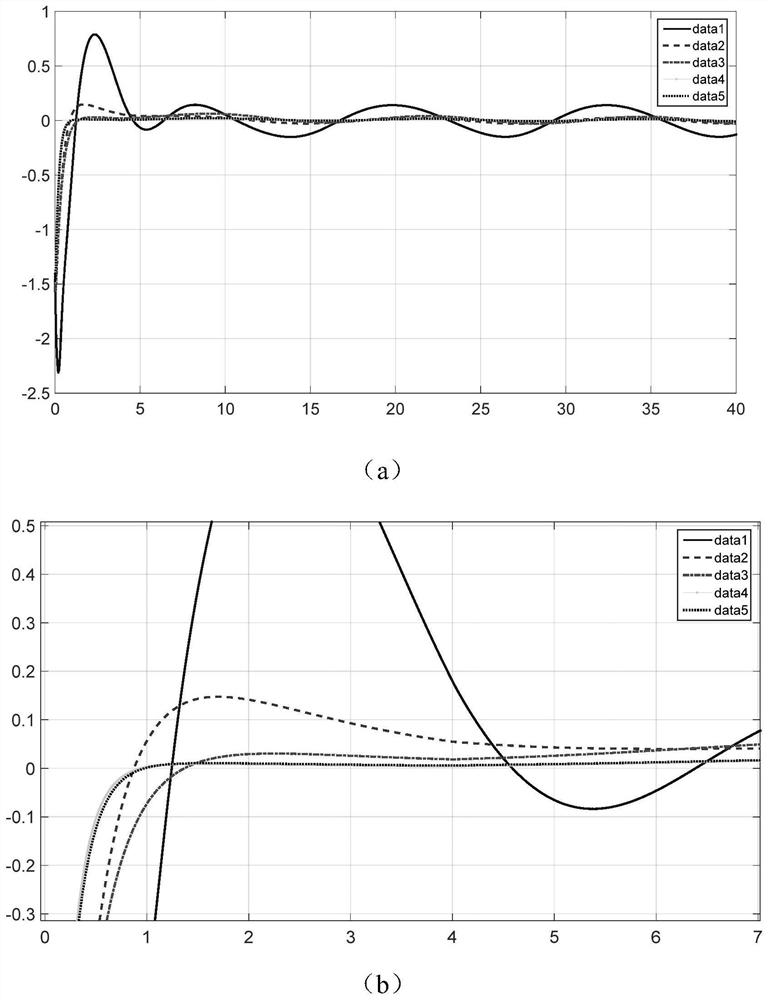
[0064] The second-order system mathematical model of a control object is as follows:
[0065]
[0066] Among them, the unknown interference term is w 2 (t) = 1.5 sin(0.5t). Use 5 groups of PID parameters as shown in Table 1 for tuning, the results are shown in figure 2 , figure 2 is the PID control simulation result graph, where, figure 2 (b) Partial enlarged view of PID control simulation results.
[0067] Table 1
[0068]
example 2
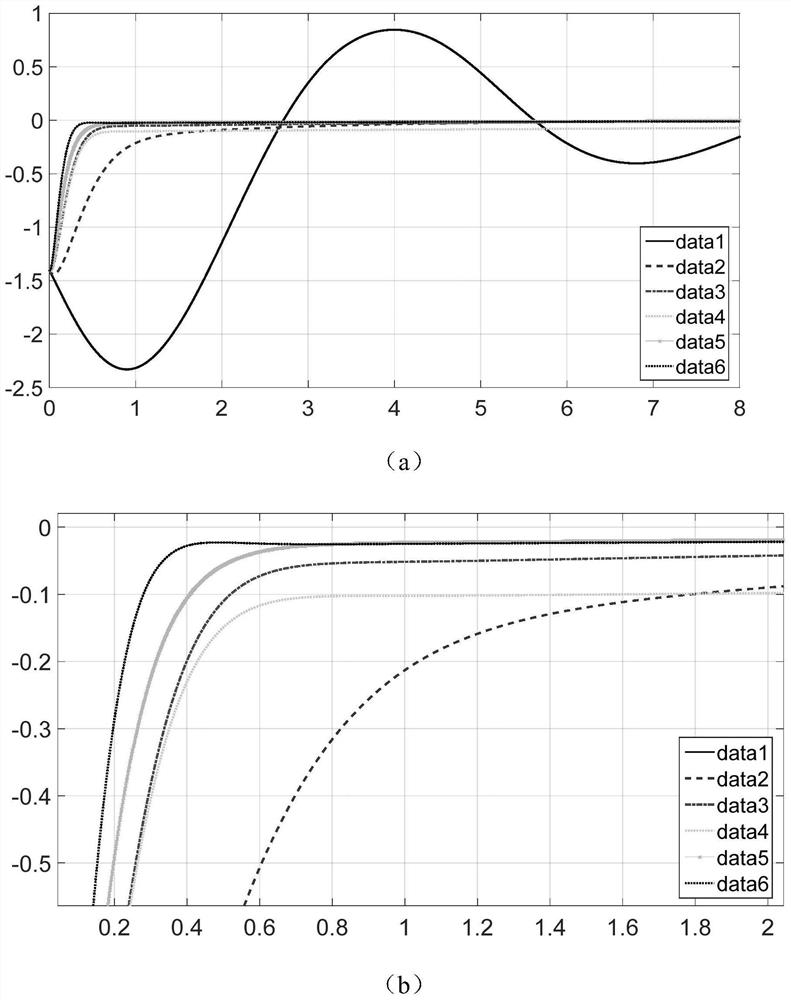
[0070] The second-order system mathematical model of a control object (UAV height control considering ground effect) is as follows:
[0071]
[0072] Among them, r=0.20 is the propeller diameter; z r =0.32+x 1 is the height of the propeller from the ground; ρ=8.4 is an undetermined parameter related to the structure of the UAV. Use 6 groups of PID parameters as shown in Table 2 for tuning, the results are shown in image 3 ,in, image 3 (b) is a partial enlarged view of the PID control simulation results.
[0073] Table 2
[0074]
[0075]
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More