

Systematic target identification and tracking method based on multi-modal data
A target recognition, multi-modal technology, applied in image data processing, instruments, computing and other directions, can solve the problems of no laser points, increased sparseness of point clouds, redundant recognition system and increased computing load, etc. There are many unknown interferences, the effect of overcoming the large computational load and enhancing the adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below with reference to the accompanying drawings and examples.
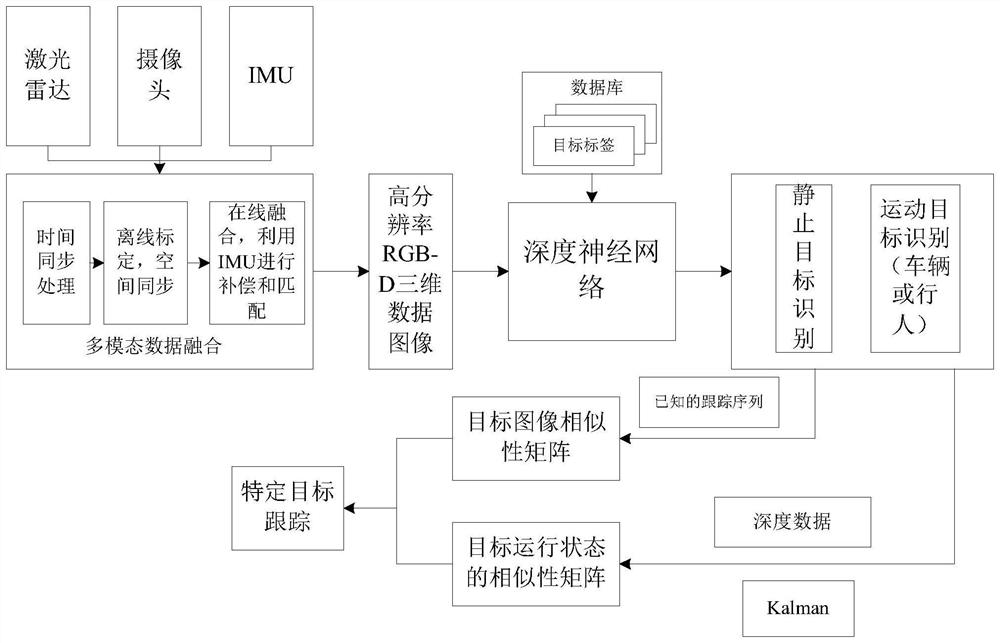
[0039] This embodiment provides a systematic target recognition and tracking method based on multi-modal data, see attached figure 1 ,Specific steps are as follows:
[0040] Step 1, the ground unmanned platform is loaded with lidar, camera and inertial measurement unit (English is Inertialmeasurement unit, referred to as IMU); wherein, the IMU can be equipped with GPS or not; Collect the point cloud data of laser ranging in the environment, collect the image data of the environment around the ground unmanned platform through the camera, and collect the pose data of the ground unmanned platform through the IMU. The point cloud data, image Data and pose data are multi-modal data;
[0041] Step 2, time synchronization processing is performed on the collected multimodal data to ensure time consistency of each multimodal data;
[0042]Step 3: Use the offline...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More