

Autonomous operation control method and device for internal combustion hydraulic transmission locomotive
A technology of operation control and hydraulic transmission, which is used in transportation and packaging, signal indicators on vehicles, railway car body parts, etc. problems such as low accuracy, to ensure the success rate, avoid collision accidents, and improve the accuracy of alignment control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0115] Embodiment 1: the traveling and parking of locomotive 3.
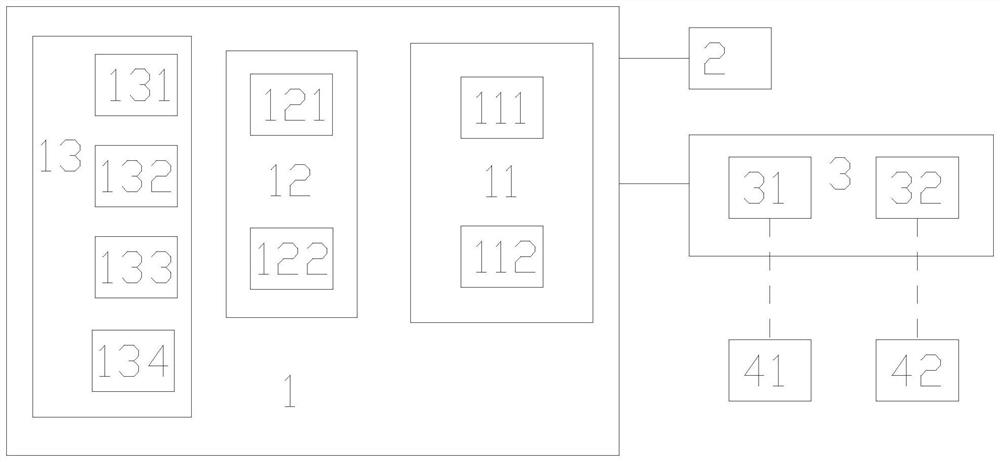
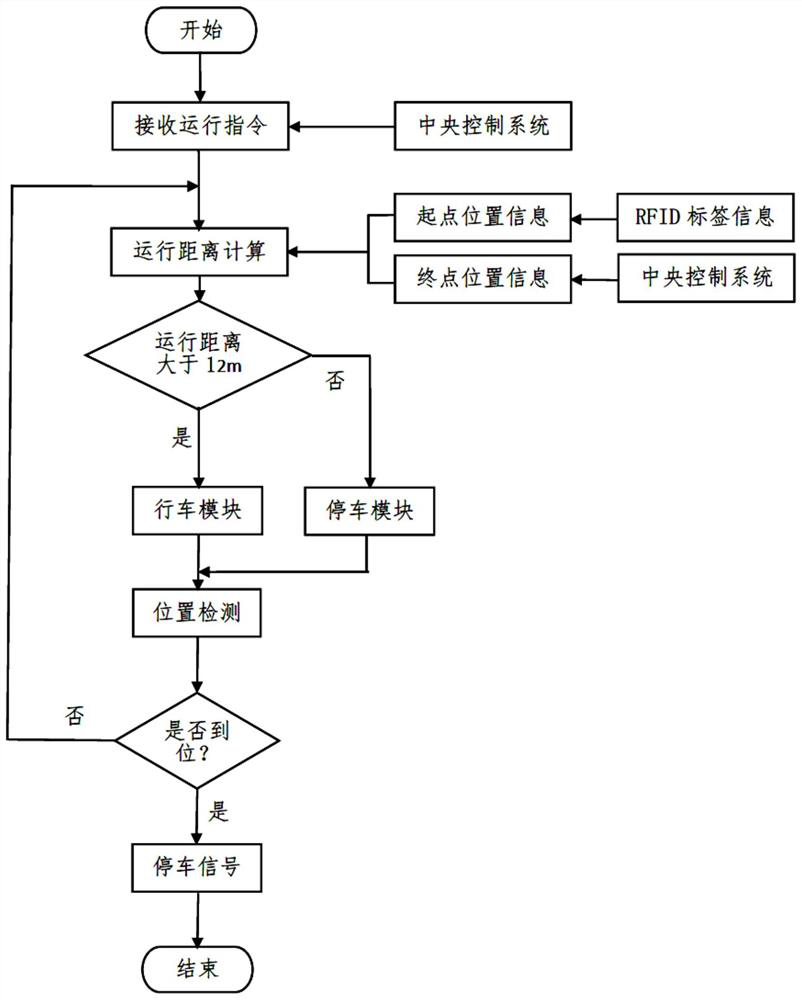
[0116] When the locomotive 3 is located at the first label 41 of 1#, the automatic operation control component 1 of the locomotive receives the operation command issued by the central control system 2, starts the operation subsystem 11, and the terminal position received by the operation subsystem 11 is the first label 41 of 20# , 1# first tag 41 and 20# first tag 41 are 60m apart. The first distance threshold is set to 12m, the distance between the first tag 41 of 1# and the first tag 41 of 20# is greater than 12m, and the first driving module 111 is started. The acceleration distance of the locomotive 3 to 10km / h is 10.8m, and the braking distance corresponding to the speed of 10km / h is 5m; the acceleration distance of the locomotive 3 to 6km / h is 6.7m, and the speed is 6km / h. The corresponding braking distance is 2.3m; the acceleration distance when the locomotive 3 accelerates to 2km / h is 3.2m, and the brak...
Embodiment 2
[0118] Embodiment 2: Alignment of locomotive 3.
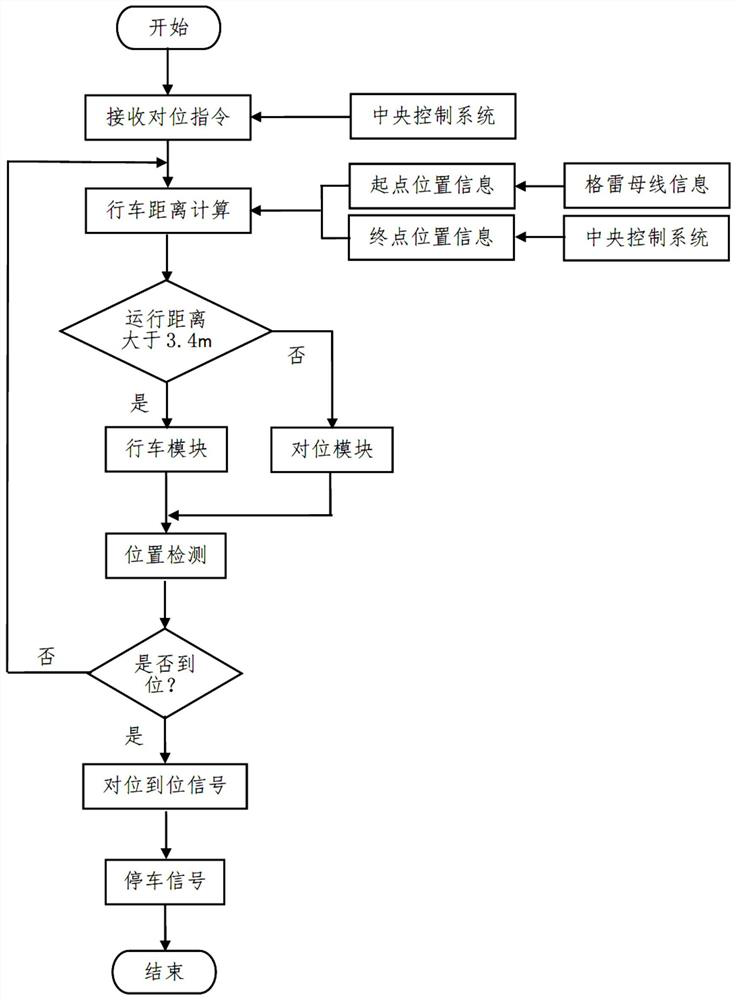
[0119]The locomotive 3 stops before the alignment position (about 30m away from the alignment position), the locomotive automatic operation control component 1 receives the alignment command issued by the central control system 2, starts the alignment subsystem 12, and the alignment subsystem 12 receives the second reading The position information of the second tag 42 read by the writer 32 calculates that the distance between the real-time position of the locomotive 3 and the alignment position is 30m. Take the second distance threshold as 3.4m, and the distance between the real-time position of the locomotive 3 and the alignment position is greater than 3.4m, and the alignment subsystem 12 starts the second driving module 122 to drive the locomotive 3 to run at a constant speed of 2km / h until the second reading When the distance between the position information of the second tag 42 read by the writer 32 and the real-time posit...
Embodiment 3
[0120] Embodiment 3: the connection of locomotive 3. The locomotive 3 stops before the connecting position (4-5m away from the connecting position), the locomotive automatic operation control component 1 receives the connecting command issued by the central control system 2, starts the connecting subsystem 13, and simultaneously starts the third driving module 134 , give locomotive 3 an instruction to accelerate for 600 ms at intervals of 2 s, and control locomotive 3 to run at a speed of about 0.5 km / h, so that locomotive 3 is constantly approaching the connected mixed-rail car. When any sensor in the coupler lock pin sensor 132 installed on the coupler and the vehicle distance detection sensor 133 sends a triggered signal to the locomotive 3, the locomotive automatic operation control assembly 1 issues a power cut and braking command to the locomotive 3 until the locomotive 3 parking. By logically judging the signals of the knuckle sensor 131, the coupler lock pin sensor 13...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More