

Robot joint motor parameter identification and control parameter self-tuning method
A technology for robot joints and control parameters, applied in motor generator control, motor control, AC motor control, etc., can solve the problems of high hardware requirements, large data volume, complex calculation, etc., and achieve the effect of high identification accuracy and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
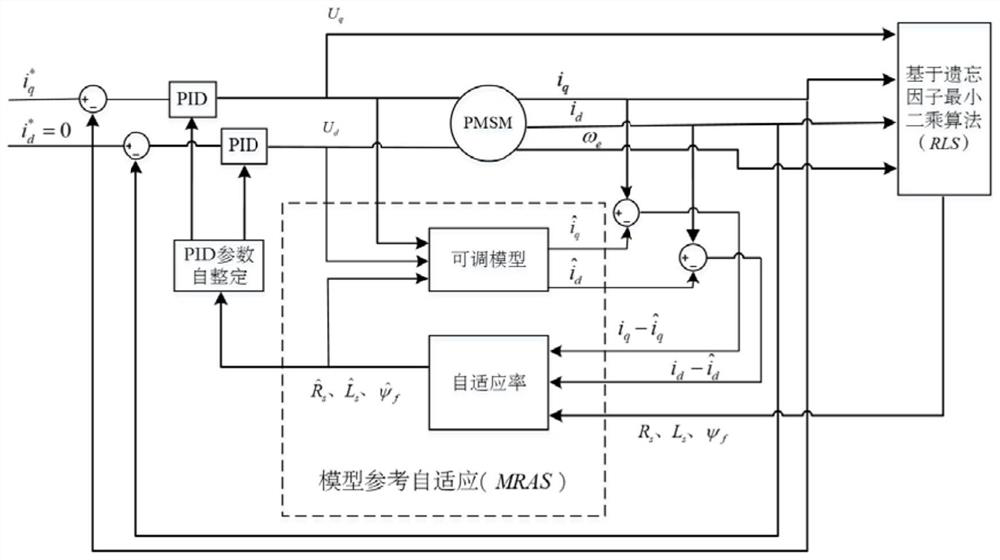
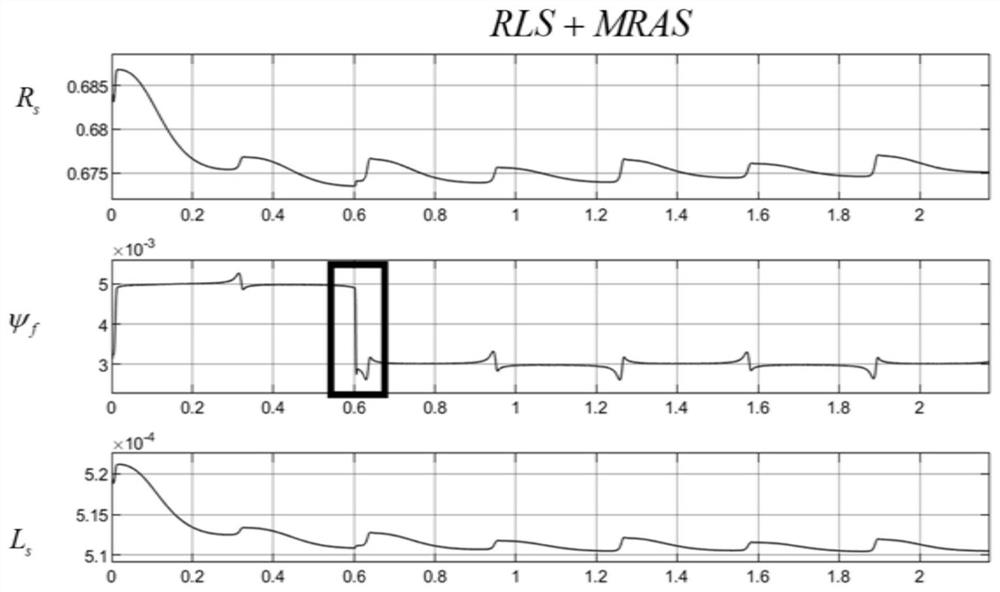
[0049] The present invention utilizes the least squares algorithm based on the forgetting factor to quickly identify the motor parameters as the initial value of the model reference self-adaptive algorithm to further accurately identify the motor parameters, and according to the identification parameters, online self-tuning of the motor control current loop PID parameters can achieve a better control effect .
[0050] Such as figure 1 As shown, the flowchart of the embodiment of the present invention has the following steps:
[0051] Step (1) Use the multi-loop PID servo control method and the motor vector control algorithm to control the movement of the joint motors of the robot, and collect the d-axis voltage u of the joint motors d , d-axis current i d , q-axis voltage u q , q-axis current i q and the motor rotor electrical angular velocity ω e .
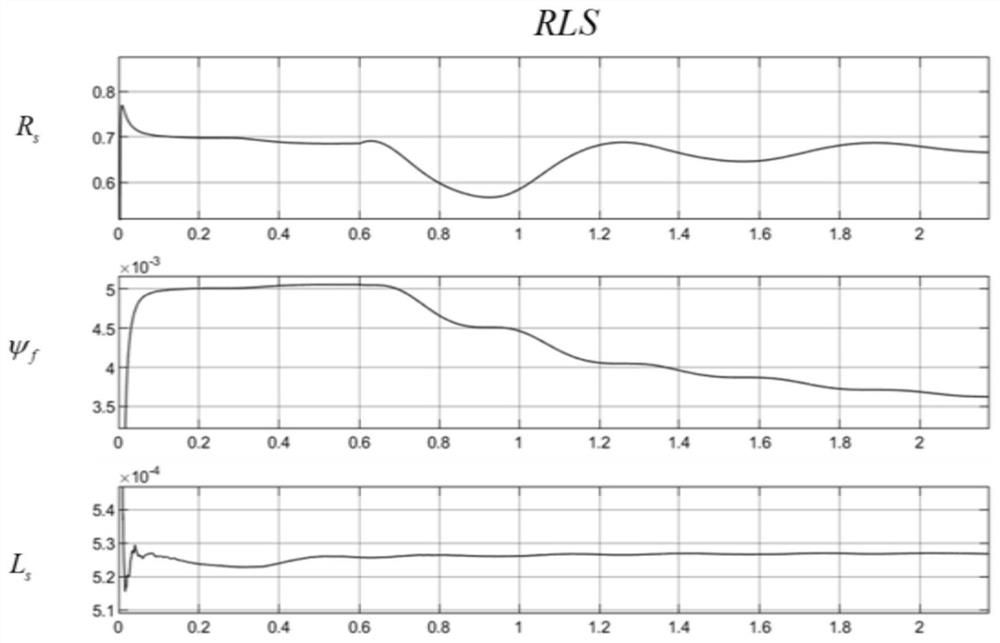
[0052] Step (2) Utilize the recursive least squares algorithm based on the forgetting factor to identify joint motor resi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More