

Efficient nested grid host unit searching method in aircraft dynamic flow field analysis
A search method and aircraft technology, applied in the field of efficient nested grid host cell search, can solve problems such as unbalanced tree structure, reduced search host cell efficiency, and increased depth, so as to improve efficiency, reduce intersection judgment tasks, and reduce small depth effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
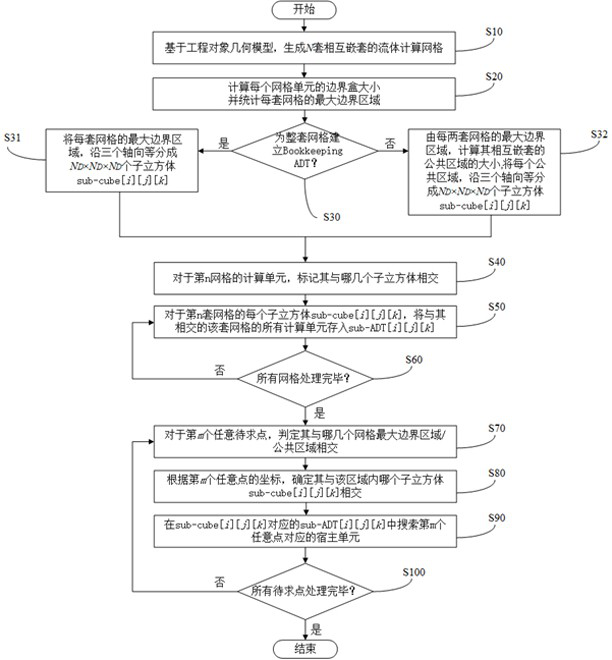
[0044] The present invention discloses a highly efficient nested grid host unit search method in the dynamic flow field analysis of aircraft, such as figure 1 As shown, the following steps S10-S100 are included:
[0045] S10. Based on the geometric model of the engineering object, generate N sets of nested fluid calculation grids. The fluid calculation grids can be of any type, such as tetrahedron, hexahedron, polyhedron, and the like.
[0046] S20. Calculat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More