Single ignition point positioning method based on SRTM 90m DEM
A positioning method and fire point technology, which is applied in image data processing, measuring devices, instruments, etc., can solve the problems of reducing equipment coverage, impossibility, and increasing equipment costs, so as to enhance scene applicability, improve rescue timeliness, and improve The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
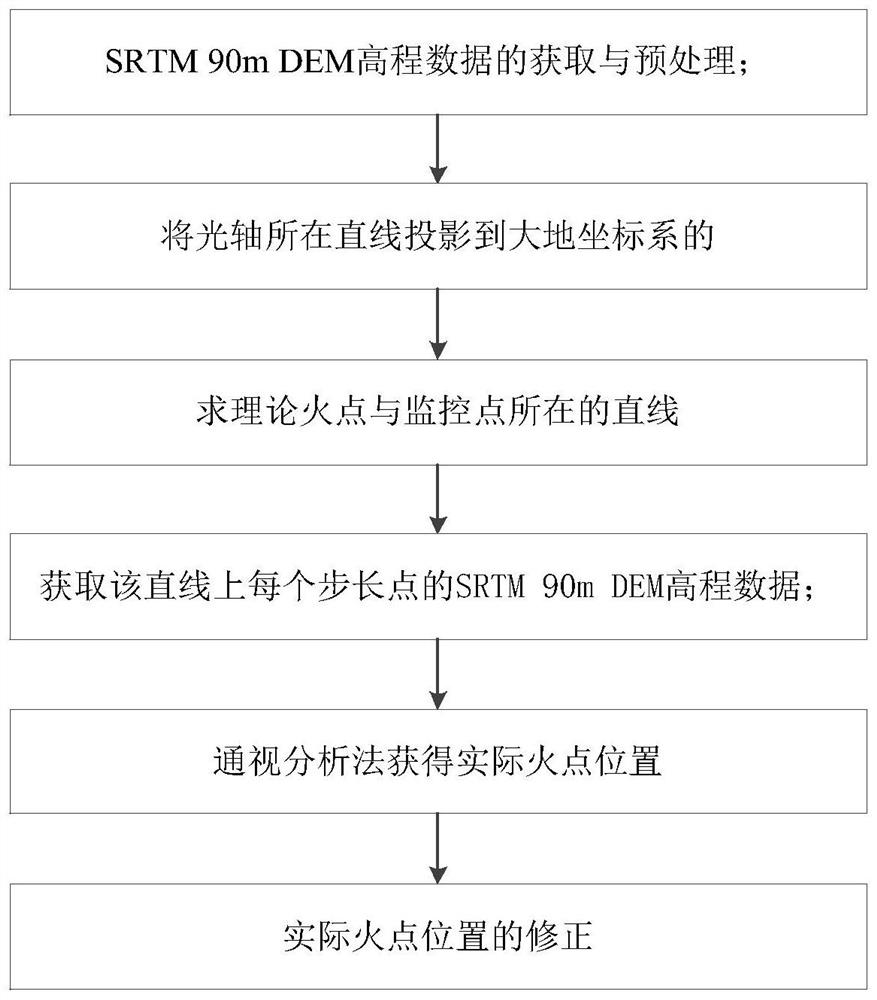
[0040] The present invention provides a single ignition point positioning method based on SRTM 90m DEM, such as figure 1 shown, including the following steps:
[0041] (1) Obtain SRTM 90m DEM elevation data and preprocess it; data preprocessing includes format conversion, coordinate transformation, data editing, vector conversion and data block sequentially.
[0042] Format conversion realizes the unified conversion of img and other format data into TIF format; coordinate transformation converts the coordinate system into the coordinates consistent with the gis display platform, and realizes the conversion between WGS84, GCJ02, BD09 and other coordinate systems; data editing realizes noise data and due to construction The part of the elevation data change caused by the projec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com