

Simple robot stacking control system and method
A control system and robot technology, applied in the field of robot palletizing, can solve the problems of high operator ability requirements, single function of palletizing process package, and inability to meet actual production, etc., achieve low technical requirements, improve intelligence, and be easy to use The effect of calling and debugging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
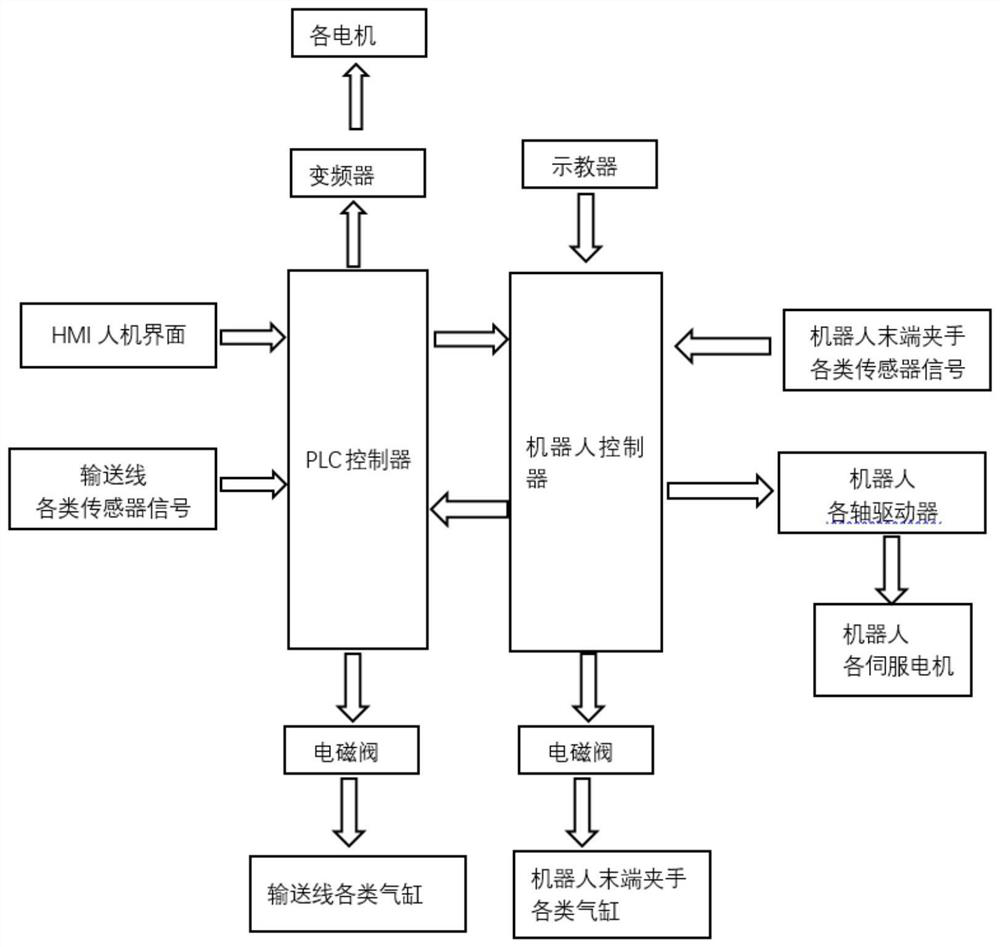
[0037] refer to figure 1 , this embodiment discloses a simple robot palletizing control system, including: HMI human-machine interface, PLC controller, robot controller, and sensor components;
[0038]The HMI man-machine interface is configured to connect and interact with the PLC controller, and the PLC controller is used to receive and process parameters of the HMI man-machine interface, so that the HMI man-machine interface and the PLC controller perform human-computer interaction ;
[0039] The robot controller is configured to communicate with the PLC controller, so that the PLC controller and the robot controller perform information interaction, and the PLC controller writes the palletizing formula data of the HMI man-machine interface into the robot control and receive information feedback from the robot controller, so that the robot controller can issue instructions to control the actions of the robot, and generate motion trajectories to complete the palletizing task ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More