

Light high-strength intelligent detection robot for detecting appearance and cable force of bridge inhaul cable
A bridge cable, intelligent detection technology, applied in the direction of bridges, bridge parts, bridge construction, etc., can solve the problems that the inspection personnel cannot reach the cable force test point, the crawling resistance is large, and the cable force sensor and the cable cannot be closely attached. To achieve the effect of intuitive display and prevention of impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions in the embodiments of the present invention will be described clearly and completely below. Obviously, the described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
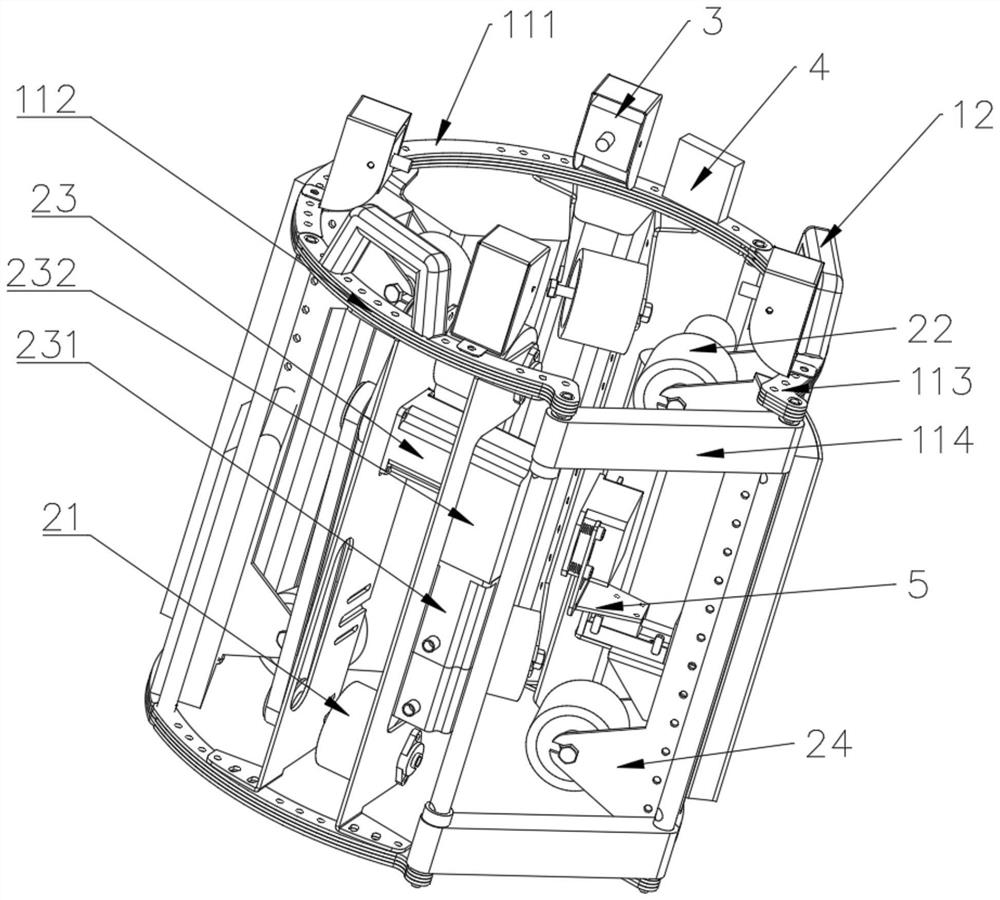
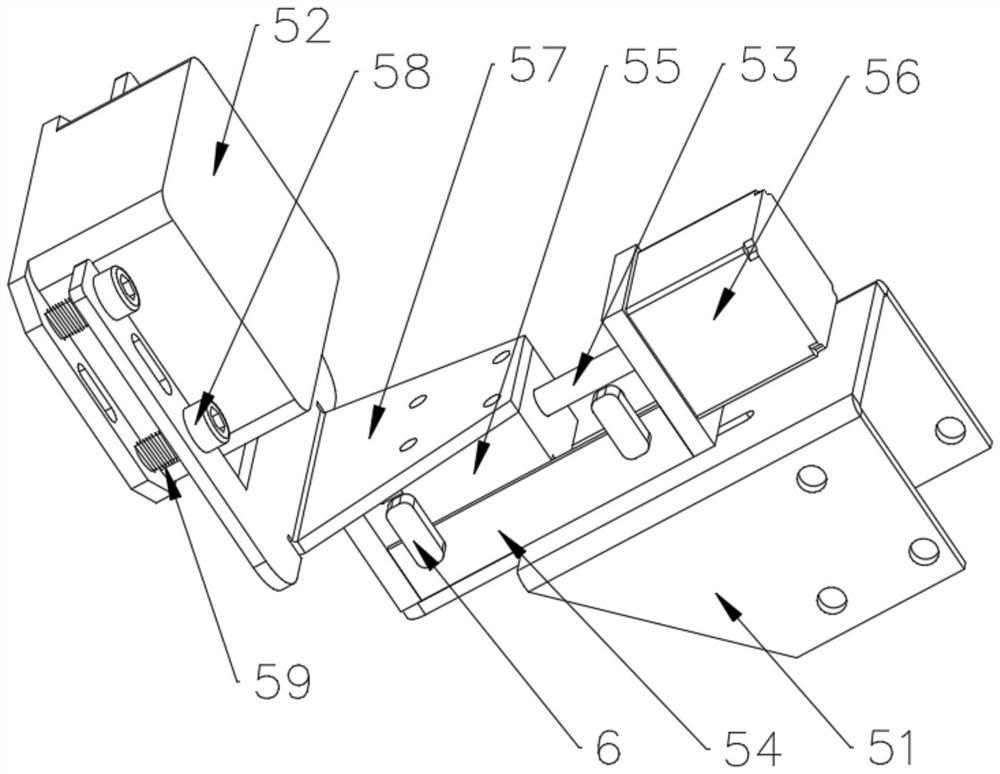
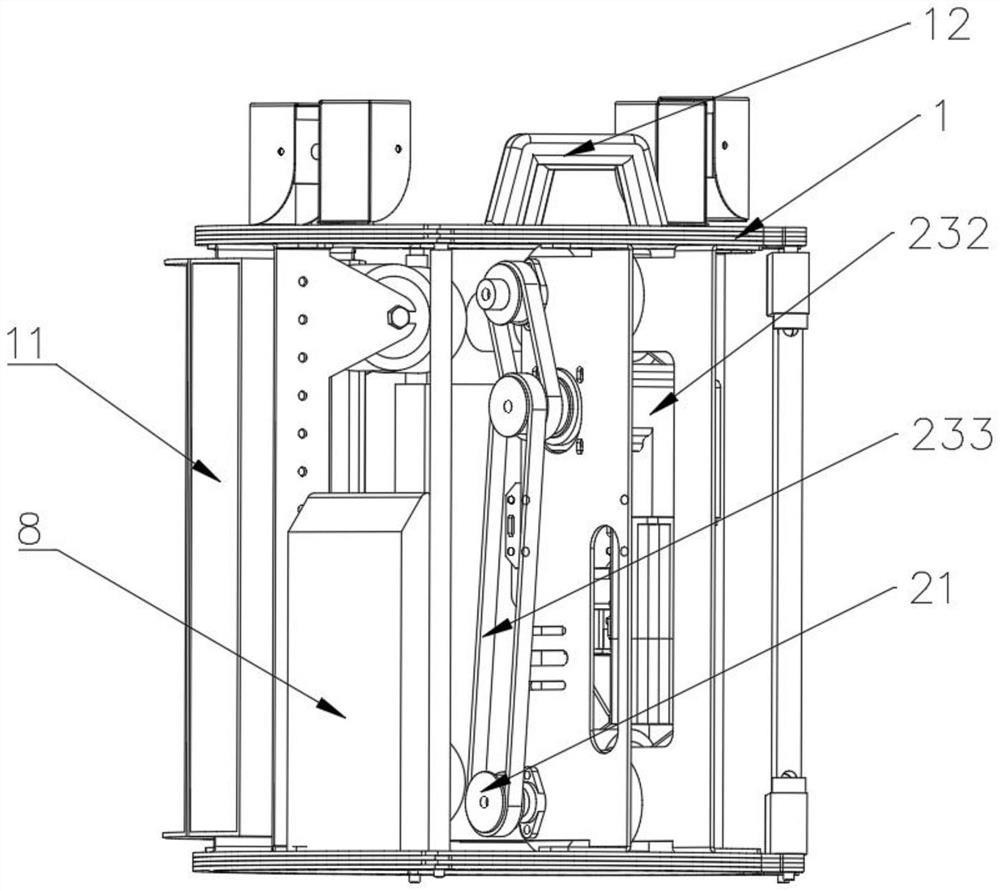
[0039] like Figure 1-9 Shown is a light-duty, high-strength intelligent detection robot for bridge cable appearance and cable force detection, including a main frame 1, a crawling mechanism, a camera 3, an end induction sensor 4, and a cable force sensor mechanism 5;
[0040] The crawling mechanism includes a set of driving wheels 21, 3 sets of driven wheels 22, and a driving device 23. The driving device 23 is drivingly connected with the driving wheel 21. The driving wheel 21 and the driven wheel 22 are both connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More