

Actuating mechanism system of automatic driving robot
An actuator and automatic driving technology, applied in the testing of machines/structural components, instruments, vehicles, etc., can solve the problems of incomplete statistics, loss of control of the test vehicle, slow response speed, etc., to improve the ride comfort, adjust Simple and convenient, the effect of reducing the size of the mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in further detail below in conjunction with the accompanying drawings.
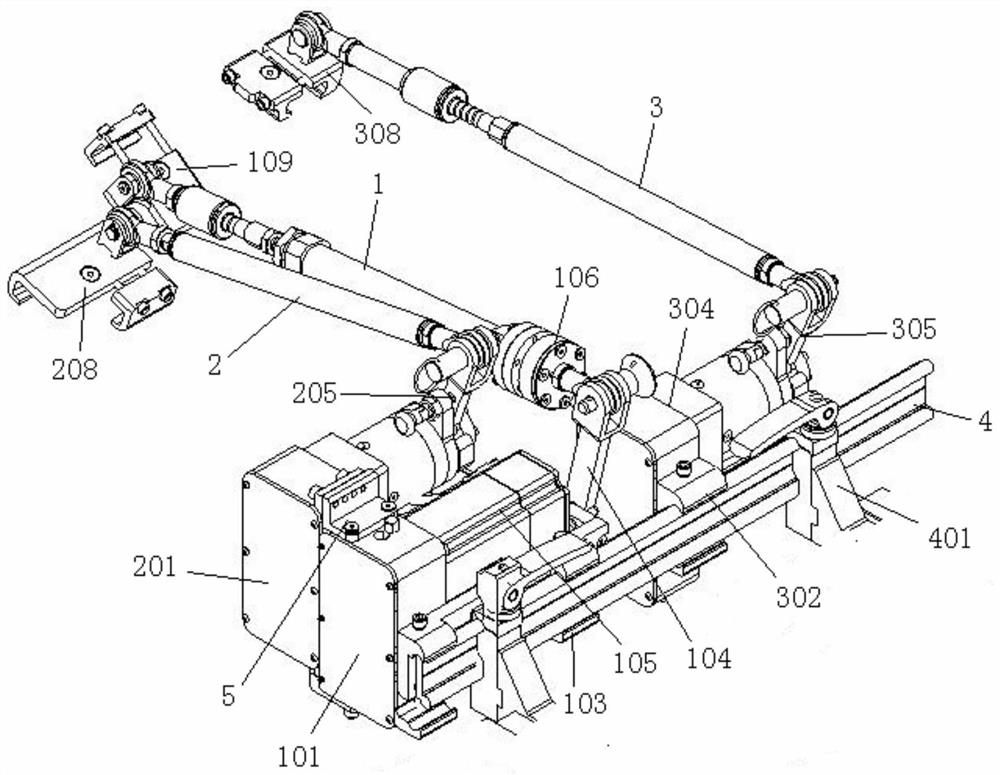
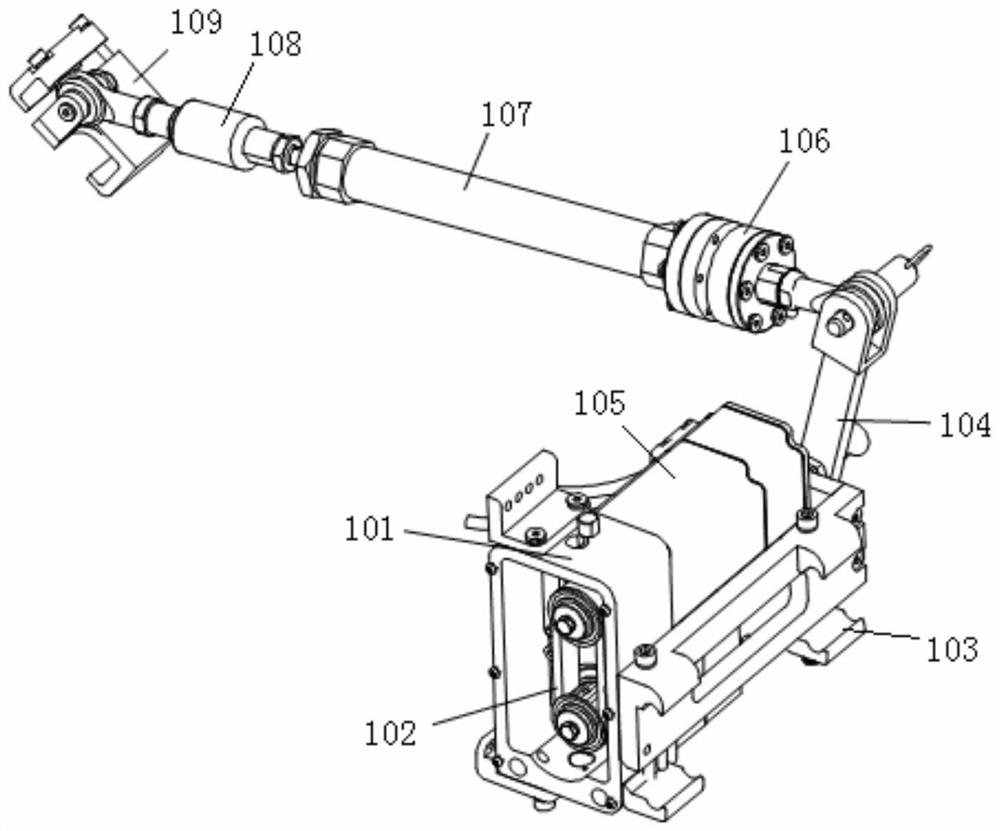
[0039] like Figures 1 to 12 As shown, the present invention includes a brake actuator 1, a clutch actuator 2, a throttle actuator 3 and a seat rail 4, wherein the brake actuator 1 includes a brake drive device, a brake sway rod 104, a brake link assembly and brake pedal adapter 109, and the brake swing rod 104 is driven to swing by the brake drive device, the upper end of the brake swing rod 104 is hinged with the rear end of the brake link assembly, and the front end of the brake link assembly is connected with the brake pedal adapter 109 Hinged, the clutch actuator 2 includes a clutch drive device, a clutch swing rod 205, a clutch link assembly and a clutch pedal adapter 208, and the clutch swing rod 205 is driven to swing by the clutch drive device. The upper end of the clutch swing rod 205 is connected to the rear end of the clutch link assembly. Hinged...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More