

Three-dimensional laser noise reduction method and device, medium and robot
A three-dimensional laser, laser technology, applied in the field of laser, can solve the problem that the algorithm cannot be eliminated, and achieve the effect of high accuracy, good noise, and noise removal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0062] For the outdoor robot, this embodiment has two assumptions:
[0063] a), the outdoor robot scene features are more obvious, there are more cars, trees, buildings, etc.;
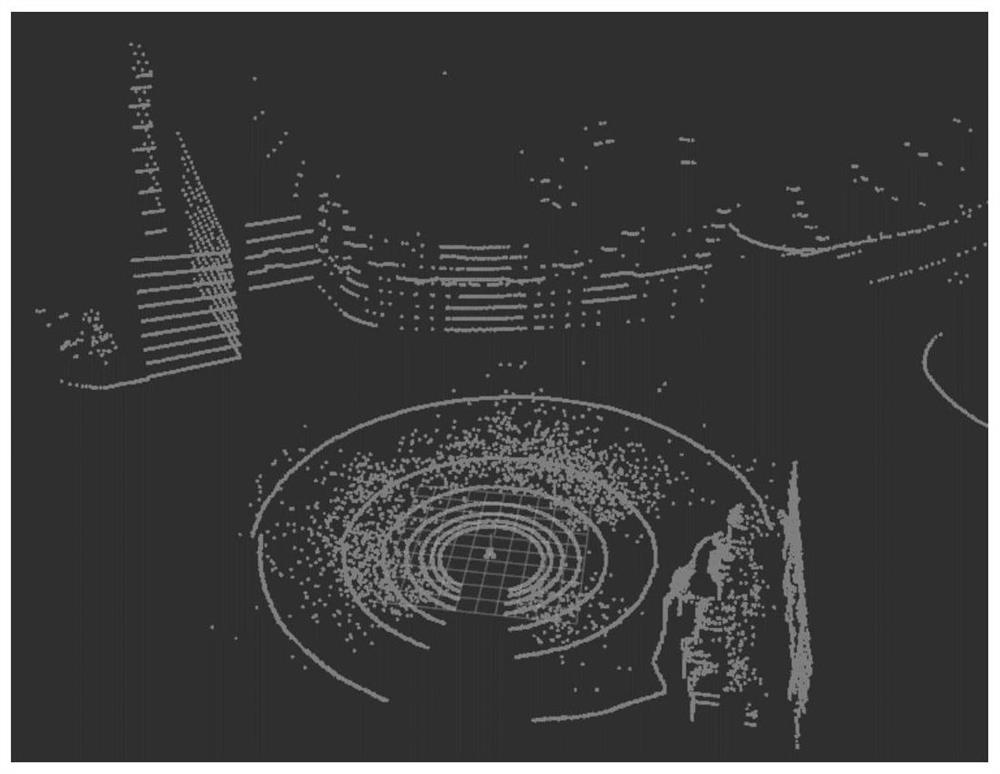
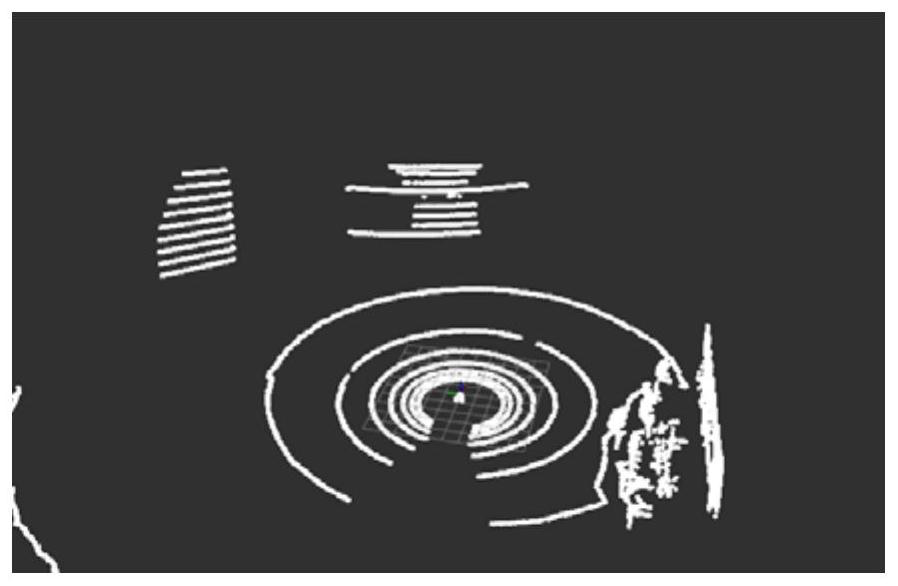
[0064] b) The rain and snow noise of the outdoor robot is a scattered area centered on the body coordinate system and spreads outward, and is irregular.
[0065] Among them, in assumption a, the outdoor robot generally runs outdoors, and it generally has obvious buildings, cars or trees. For hypothesis a, each keyframe scanned by the laser is characterized. This embodiment makes full use of the characteristic that each key frame of the laser frame has features, so that the globally unique description corresponding to each key frame has a unique identifier, which increases robustness and reduces singular values; for hypothesis b, this is A weak assumption that all noise caused by rain and snow satisfies this assumption.
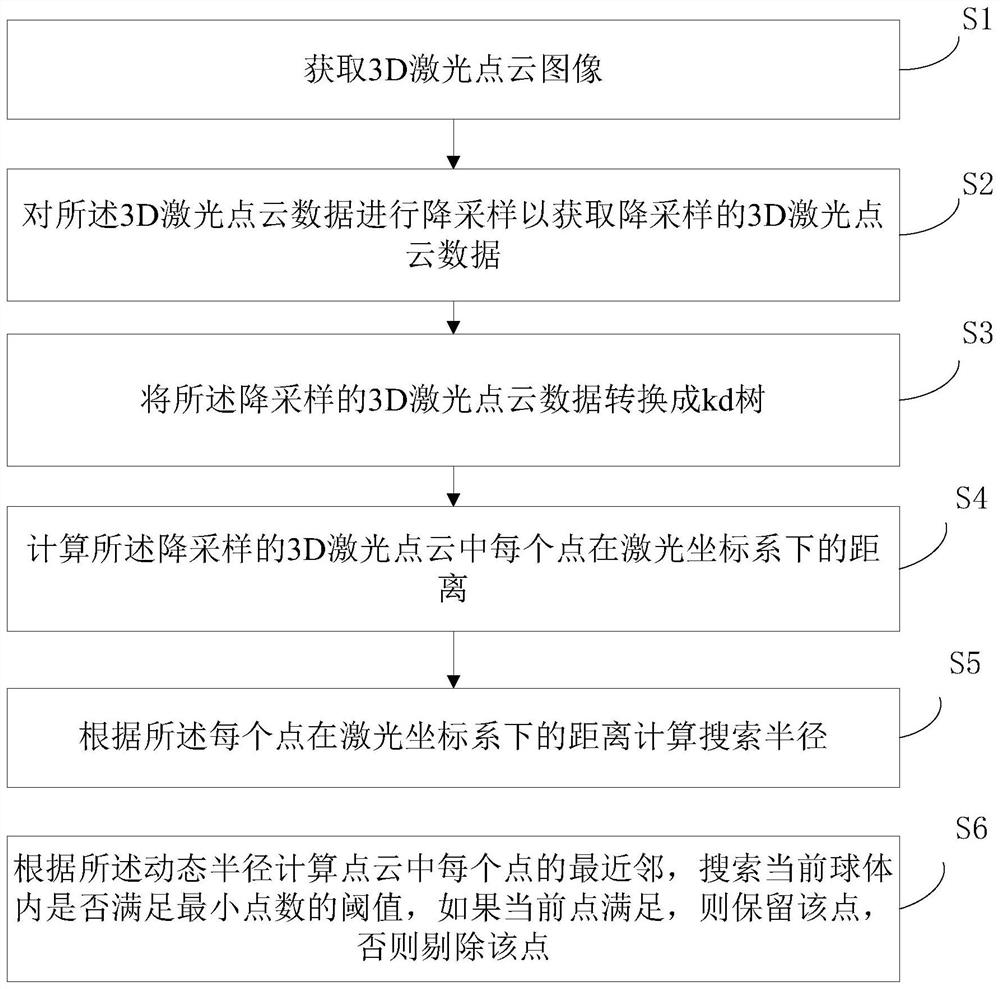
[0066] refer to figure 1 , this embodiment discloses a three-dimensional laser...
Embodiment 2
[0098] refer to Figure 5 , this embodiment discloses a three-dimensional laser noise reduction device, which includes the following units:
[0099] Point cloud acquisition unit, used to acquire 3D laser point cloud images;
[0100] Specifically, the point cloud acquisition unit can receive 3D laser point cloud data through a callback function, and the 3D laser point cloud data includes: x-direction coordinates, y-direction coordinates, and z-direction coordinates.
[0101] a downsampling unit, configured to downsample the 3D laser point cloud data to obtain downsampled 3D laser point cloud data;
[0102] After receiving the 3D laser point cloud, there are a huge number of laser points in the point cloud. The number of points will seriously affect the time complexity of noise reduction. In order to reduce the amount of calculation and ensure the integrity of the data, voxel downsampling is used.
[0103] Specifically, the down-sampling unit performs down-sampling on 0.1 m c...
Embodiment 3
[0132] refer to Figure 7 , Figure 7 It is a schematic structural diagram of a three-dimensional laser noise reduction device in this embodiment. The three-dimensional laser noise reduction apparatus 20 of this embodiment includes a processor 21 , a memory 22 , and a computer program stored in the memory 22 and executable on the processor 21 . When the processor 21 executes the computer program, the steps in the foregoing method embodiments are implemented. Alternatively, when the processor 21 executes the computer program, the functions of the modules / units in the foregoing device embodiments are implemented.
[0133] Exemplarily, the computer program may be divided into one or more modules / units, and the one or more modules / units are stored in the memory 22 and executed by the processor 21 to complete the present invention. invention. The one or more modules / units may be a series of computer program instruction segments capable of accomplishing specific functions, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More