

Optimal active-disturbance-rejection control method for electromechanical actuator of all-electric brake system
An electromechanical actuator and active disturbance rejection control technology, which is applied in general control systems, control/regulation systems, instruments, etc., can solve the problems of not considering the delayed mechanical transmission structure, difficulty in achieving control accuracy, and increasing calculation burden, etc., to achieve The effect of optimal control performance, excellent servo performance, and no-deviation tracking improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
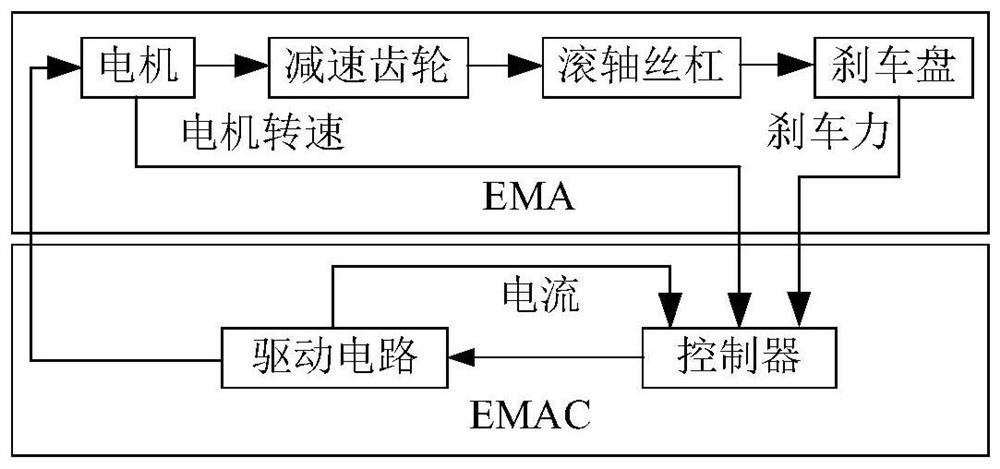
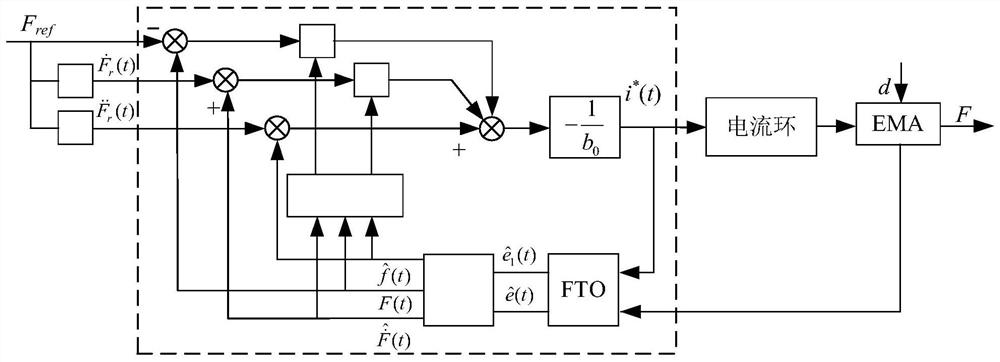
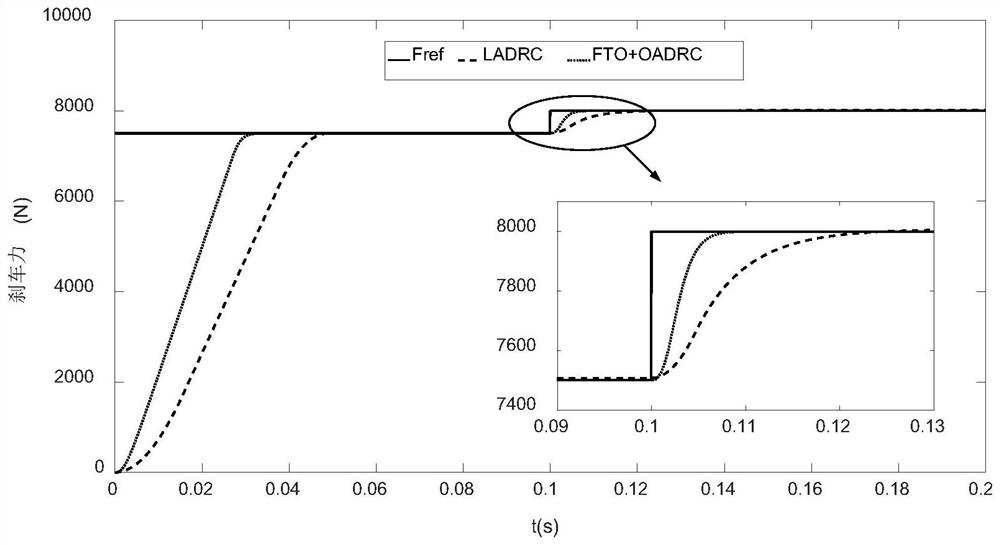
[0179] In order to verify the effectiveness of the proposed method, simulation models of electromechanical actuators and controllers were established under MATLAB R2016b software. The EMA system adopts a double closed-loop control structure. The outer loop adopts the optimal active disturbance rejection control method based on finite time observer to resist various disturbances of the system, and the inner loop is responsible for controlling the armature current of the brushless DC motor. Finally, the optimal AD method based on finite-time observer is compared with the LADRC algorithm. The simulation parameter table of electromechanical actuator is shown in Table 1. The controller parameter table is shown in Table 2.
[0180] Table 1 Electromechanical actuator simulation parameter table
[0181]
[0182] Table 2 Controller parameter table
[0183]
[0184] In order to test the dynamic performance of the EMA system and the anti-interference ability of the method design...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More