Intelligent control method of ankle-foot walking aid
A technology of intelligent control and walking aids, which is applied in the direction of devices that help people walk, physical therapy, etc., can solve the problem of not taking into account the individual needs of users, their own movement coordination, the adverse effects of the healthy life of the elderly, and muscle pain. Weakness and other problems, to achieve the effect of improving comfort and safety, simple structure, and exercising sports ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
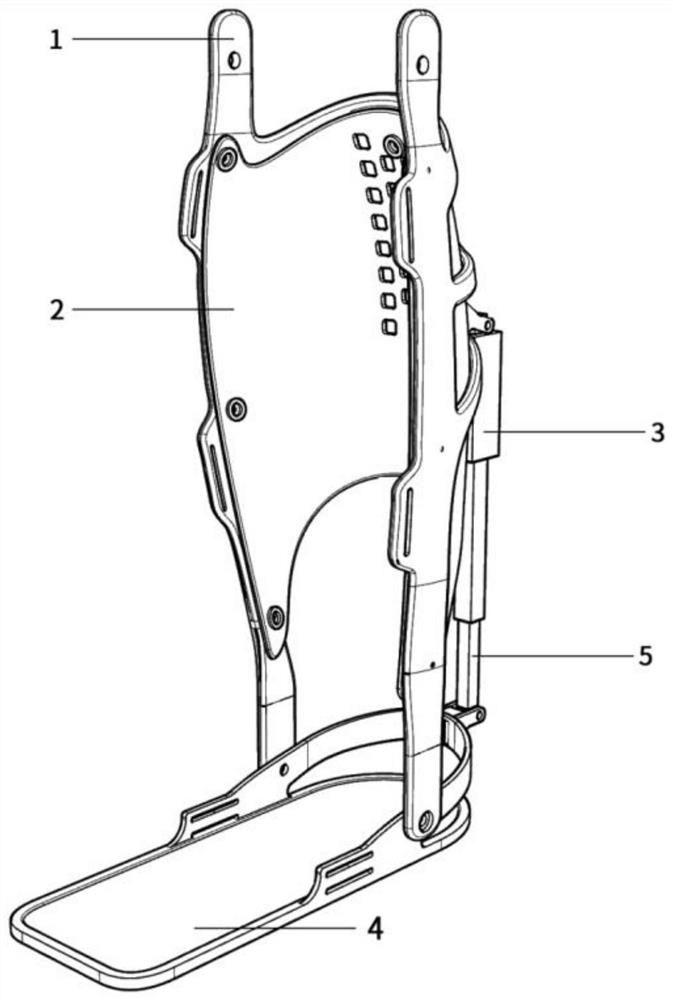
[0045] see Figure 1-10 , a new type of ankle-foot walker, including a walking mechanism and an electric push rod that drives the walking mechanism.
[0046] Specifically, the walking mechanism includes a calf mechanism and a sole mechanism; the calf mechanism includes a calf supporting exoskeleton 1, and a calf supporting lining 2 is installed inside the calf supporting exoskeleton 1; the sole mechanism includes a bottom plate 4, and the calf supporting exoskeleton 1 and the bottom plate 4 hinged connections.
[0047] Specifically, the calf support outer frame 1 and the bottom plate 4 are hingedly connected, the base 3 on the electric push rod is hingedly arranged on the calf support outer frame 1 , and the push rod 5 of the electric push rod is hingedly connected with the bottom plate 4 .
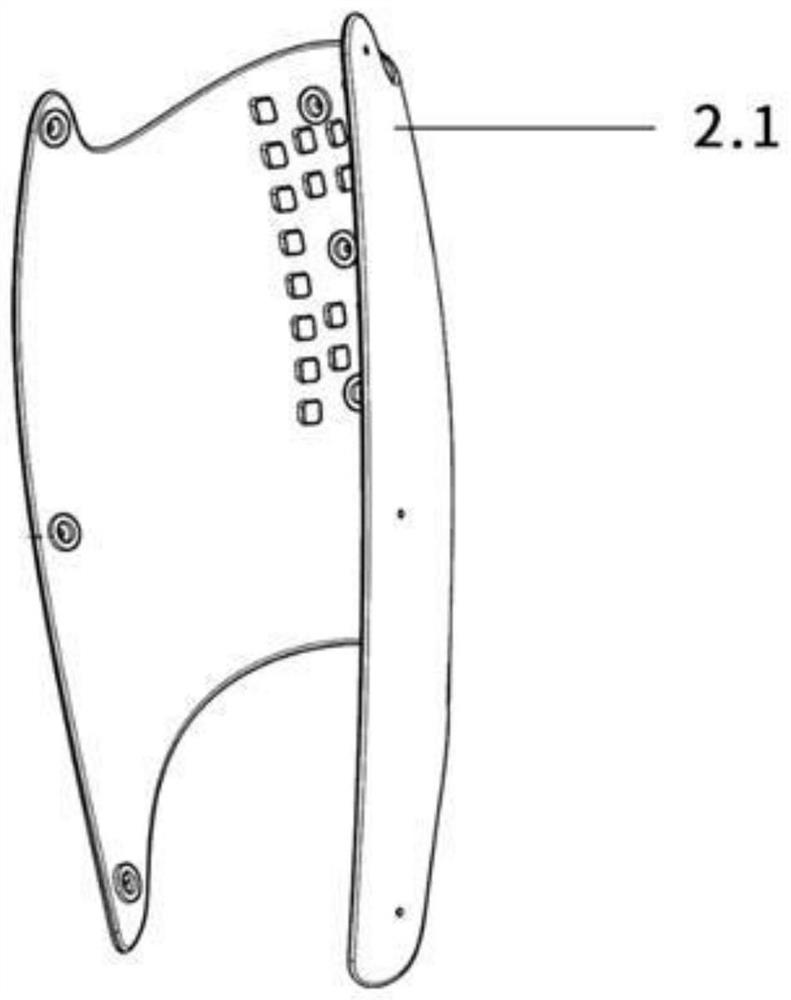
[0048] Specifically, the calf supports the exoskeleton 1, such as figure 2 Shown: including calf outer sheath 1.1, the shape of calf outer sheath 1.1 fits the curve of human calf and c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More