

High-resistance underwater cable robot and control method thereof
A robot and flowing water technology, which is applied to underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problems of underwater robot operation, large resistance coefficient, and large flow area, so as to improve the operation speed and flow resistance. Stability, improving underwater positioning accuracy, and reducing the effect of running resistance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
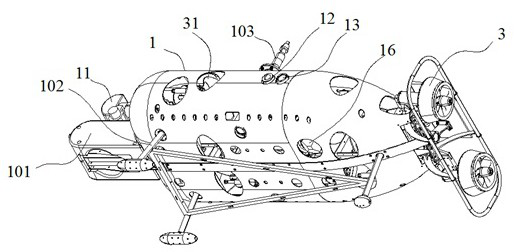
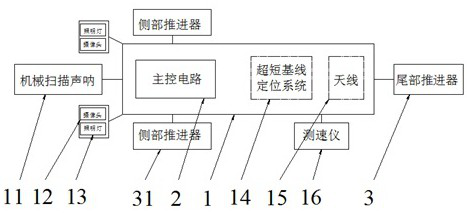
[0052] Example 1, refer to Figure 1-Figure 6-4 , which is an embodiment of the present invention, which provides an underwater cabled robot with high resistance to current. It includes a robot shell 1, which is constructed by the simulation method of underwater fluid motion, and has a streamlined spindle structure and is closed. The bow is installed with lighting 13, camera 12, floating material 101 and mechanical scanning sonar 11 installed on the floating material 101. The bottom is installed with a leg support 102 and a speedometer 16. Both sides and the stern are made of robot shells. The central axis of the body 1 is the axis of symmetry, and the lighting lamp 13, the camera 12 and the mounting frame are installed in a horizontally symmetrical shape, and a propulsion mechanism is installed on each mounting frame; it also includes a main control for controlling the underwater cabled robot. Circuit 2, the underwater cabled robot includes a processor 21, a data acquisition...
Embodiment 2
[0077] Example 2, refer to Figure 5 , which is an embodiment of the present invention. This embodiment provides that the main control circuit 2 of the underwater cabled robot also includes a sensing device 25 connected to the processor 21. This embodiment is the same as the specific implementation content of Embodiment 1. The difference is that the underwater cabled robot is equipped with sensing equipment that meets the needs and functions to improve the comprehensiveness of the detection data, which is conducive to the monitoring of different waters.
[0078] The specific sensing device 25 in this embodiment includes a temperature sensor, a flow rate sensor, and a sensor for water quality monitoring installed on the outer wall of the robot housing 1, and also includes an encoder connected to the drive motor of the propulsion mechanism, installed on the robot housing 1 Internal spirit level and inclination sensor.
[0079]To sum up, the present invention utilizes the reason...
example 1
[0081] Example 1 Tianjin Dagu Fortress Test. The Tianjin Dagu Fortress test site is a still water area adjacent to the port channel of Tianjin Port. There are artificially erected simple docks on the embankment. When deploying and recovering high-current-resistant equipment, the crane and quick lock can be used together to quickly deploy the equipment into seawater. When the equipment is equipped with BV5000 sonar, it is launched in the test waters, and its maximum sailing speed can reach 6 knots (3 m / s).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More